超級簡單的大疆tello無人機視頻實現(很少代碼)
大疆tello無人機出來有1年時間了,使用pc查看視頻的功能也只是今年才開放,經過2天的摸索,終于用簡單的方法實現,不敢獨享,分享出來。

1、連接tello的wifi:

2、使用udp組件發送打開視頻流命令“streamon”
IdUDPClient1.Host:='192.168.10.1';
IdUDPClient1.Port:=8889;
IdUDPClient1.Active:=True;
IdUDPClient1.Send('command');
IdUDPClient1.Send('streamon');//打開視頻
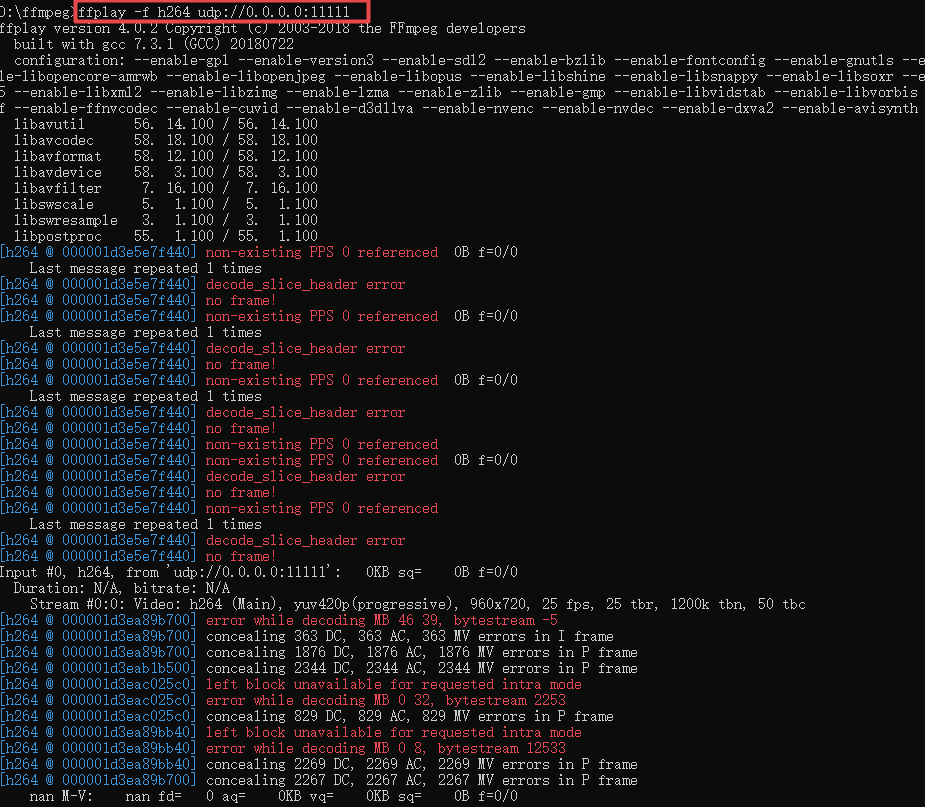
3、運行ffmpeg中的ffplay查看視頻:在cmd中輸入“ffplay -f h264 udp://0.0.0.0:11111”
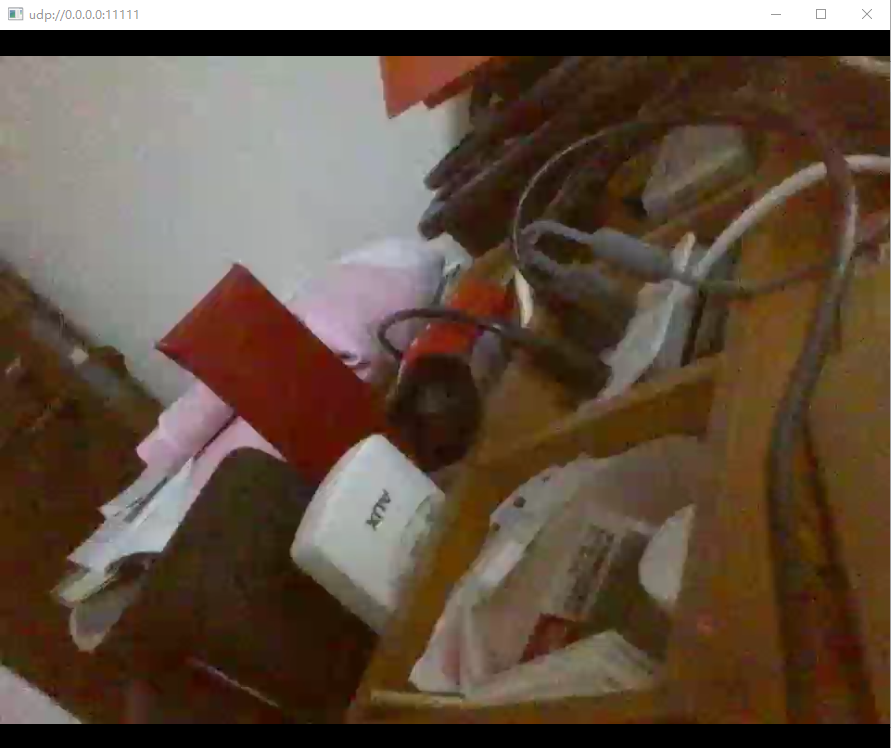
4、展示結果(延遲2秒左右,不是非常清晰)
5、關閉視頻流“streamoff”
IdUDPClient1.Host:='192.168.10.1';
IdUDPClient1.Port:=8889;
IdUDPClient1.Active:=True;
IdUDPClient1.Send('command');
IdUDPClient1.Send('streamonoff');//關視頻
智能推薦

【大疆無人機Assistant2仿真OnboardSDK系統搭建】
【大疆無人機Assistant2仿真OnboardSDK系統搭建】 首先:一定要仔細閱讀官網給出的說明書!M600用戶使用說明,以及妙算2-C使用說明,不然都搞不清哪些線的作用是干什么的,也不清楚飛控上面哪些預留口是正常有用的! 為了想要完成OnboardSDK開發,首先要對其仿真模擬平臺進行搭建,大疆自帶了Assistant2軟件(貌似只有windows和mac版本)該軟件可對無人機固件升級,O...
大疆無人機基于自搭建RTMP服務端推流直播
思路 大疆在手機端提供了軟件DJI GO 4控制飛行參數等,其中包含自定義RTMP接口來向第三方推流進行直播業務,而我們可以利用這種直播的思路來完成畫面傳輸。 環境 精靈Phantom 4 Pro V2.0 DJI GO 4(手機端) win10(PC端) 步驟 一、搭建、啟動RTMP服務端 Notice:搭建RTMP服務端主要參考[1]、[2]鏈接中的步驟。因為我們是通過DJI GO 4來推流,...
#unity##HTC VIVE#實現簡單的無人機操作模擬
為了在我們的VR項目中增添有用功能,就添加了這個模塊。 無人機的操控是模擬現實無人機的雙搖桿手柄操作方式,對htc vive兩個手柄的touchpad的功能進行繼承重寫,實現操控: 如圖,左touchpad分成四個區域,根據touchpad的觸摸檢測觸碰位置的區域,同時根據按壓touchpad來執行操控。分別對應的:水平軸左右轉向,以及豎直軸上升下降。 而右touchpad根據觸摸位置相對圓中心的...

Tello talent無人機擴展模塊庫分析(default.ino)
?這個地方把ino后綴改成是cpp,不影響 Ardunio的編程語言,原型是wring 這個是官網的文章 雖然有注釋,但是有點少.而且宏都是大寫 一眼也看不出來,我處理一下 處理好了 這個地方是一些宏定義,在預編譯階段處理 首先是__name__這樣的叫私有變量名,這里是開啟esp32的uart0做debug用 具體這個我需要查esp32的資料 可以看到是串口1做了這個工作 這個SD...
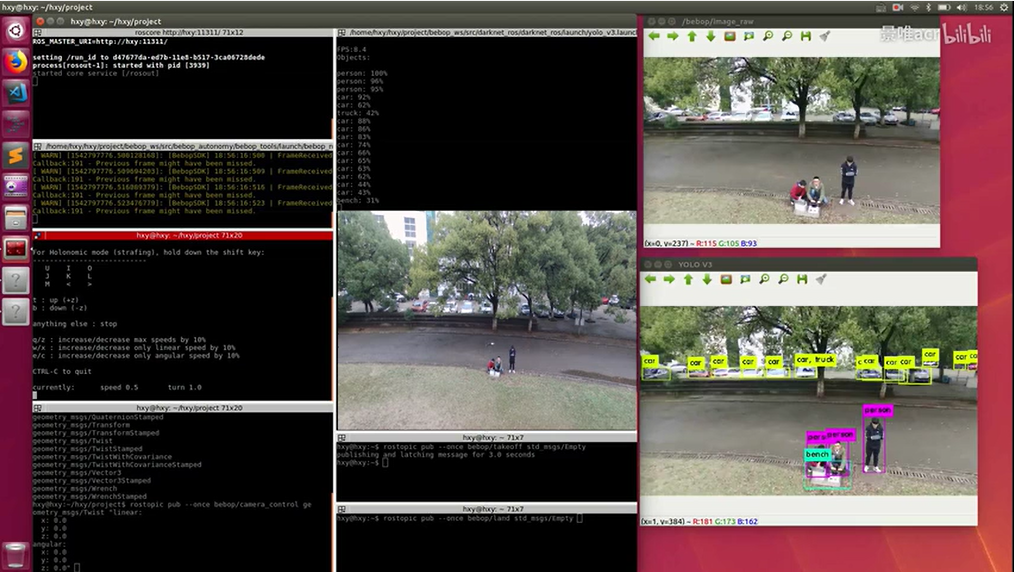
ROS+Bebop2無人機+YOLO算法實現無人機視角的實時目標檢測
前言: 很久之前,用TK1玩過一段時間的ROS,再加上各種硬件(Arduino、激光雷達、編碼電機等),模仿著做過Turtlebot小車,實現了部分Turtlebot部分的功能,最后因為雷達被我玩燒了,所以,就玩完了。 最近,身邊有幾臺Bebop2無人機,然后又在玩深度學習的目標檢測,因此,就嘗試了一下將目標檢測算法和無人機結合在一起玩一玩。 話不多說,先看玩成功的視頻鏈接: B站:https:/...
猜你喜歡


freemarker + ItextRender 根據模板生成PDF文件
1. 制作模板 2. 獲取模板,并將所獲取的數據加載生成html文件 2. 生成PDF文件 其中由兩個地方需要注意,都是關于獲取文件路徑的問題,由于項目部署的時候是打包成jar包形式,所以在開發過程中時直接安照傳統的獲取方法沒有一點文件,但是當打包后部署,總是出錯。于是參考網上文章,先將文件讀出來到項目的臨時目錄下,然后再按正常方式加載該臨時文件; 還有一個問題至今沒有解決,就是關于生成PDF文件...
電腦空間不夠了?教你一個小秒招快速清理 Docker 占用的磁盤空間!
Docker 很占用空間,每當我們運行容器、拉取鏡像、部署應用、構建自己的鏡像時,我們的磁盤空間會被大量占用。 如果你也被這個問題所困擾,咱們就一起看一下 Docker 是如何使用磁盤空間的,以及如何回收。 docker 占用的空間可以通過下面的命令查看: TYPE 列出了docker 使用磁盤的 4 種類型: Images:所有鏡像占用的空間,包括拉取下來的鏡像,和本地構建的。 Con...

requests實現全自動PPT模板
http://www.1ppt.com/moban/ 可以免費的下載PPT模板,當然如果要人工一個個下,還是挺麻煩的,我們可以利用requests輕松下載 訪問這個主頁,我們可以看到下面的樣式 點每一個PPT模板的圖片,我們可以進入到詳細的信息頁面,翻到下面,我們可以看到對應的下載地址 點擊這個下載的按鈕,我們便可以下載對應的PPT壓縮包 那我們就開始做吧 首先,查看網頁的源代碼,我們可以看到每一...