ROS實現無人機目標跟蹤/物體跟隨/循跡
標簽: ROS Robot OpenCV opencv 目標跟蹤 計算機視覺
- 本實驗采用ROS和OpenCV實現功能,實驗平臺采用Parrot的Bebop2無人機,實驗平臺的操作方式見:ROS控制Parrot Bebop2無人機
1. 物體跟蹤
1.1 實現思路
調用無人機的圖像:
cv_image = self.bridge.imgmsg_to_cv2(data, “bgr8”)
之后同OpenCV實現機器人對物體進行移動跟隨一樣,獲取所要跟蹤的物體
節點的發布和接收見:ROS學習: Topic通訊
1.2 代碼示例
import rospy
import cv2 as cv
from geometry_msgs.msg import Twist
from cv_bridge import CvBridge, CvBridgeError
from sensor_msgs.msg import Image
class image_converter:
def __init__(self):
self.cmd_pub = rospy.Publisher("/bebop/cmd_vel", Twist, queue_size=1)
self.bridge = CvBridge()
self.image_sub = rospy.Subscriber("/bebop/image_raw", Image, self.callback)
def callback(self, data):
try:
cv_image = self.bridge.imgmsg_to_cv2(data, "bgr8")
except CvBridgeError as e:
print e
# 定義結構元素
kernel = cv.getStructuringElement(cv.MORPH_RECT, (3, 3))
# print kernel
height, width = cv_image.shape[0:2]
screen_center = width / 2
screen_center_h = height / 2
offset = 50
offset_h = 30
lower_b = (75, 43, 46)
upper_b = (110, 255, 255)
hsv_frame = cv.cvtColor(cv_image, cv.COLOR_BGR2HSV)
mask = cv.inRange(hsv_frame, lower_b, upper_b)
mask2 = cv.morphologyEx(mask, cv.MORPH_OPEN, kernel)
mask3 = cv.morphologyEx(mask2, cv.MORPH_CLOSE, kernel)
cv.imshow("mask", mask3)
# 找出面積最大的區域
_, contours, _ = cv.findContours(mask3, cv.RETR_EXTERNAL, cv.CHAIN_APPROX_SIMPLE)
maxArea = 0
maxIndex = 0
for i, c in enumerate(contours):
area = cv.contourArea(c)
if area > maxArea:
maxArea = area
maxIndex = i
# 繪制
cv.drawContours(cv_image, contours, maxIndex, (255, 255, 0), 2)
# 獲取外切矩形
x, y, w, h = cv.boundingRect(contours[maxIndex])
cv.rectangle(cv_image, (x, y), (x + w, y + h), (255, 0, 0), 2)
# 獲取中心像素點
center_x = int(x + w / 2)
center_y = int(y + h / 2)
cv.circle(cv_image, (center_x, center_y), 5, (0, 0, 255), -1)
cv.imshow("Image", cv_image)
# 簡單的打印反饋數據,之后補充運動控制
twist = Twist()
# 左右轉向和移動
if center_x < screen_center - offset:
twist.linear.x = 0.0
twist.linear.y = 0.2
twist.angular.z = 0.2
print "turn left"
elif screen_center - offset <= center_x <= screen_center + offset:
twist.linear.x = 0.0
twist.linear.y = 0.0
twist.angular.z = 0
print "keep"
elif center_x > screen_center + offset:
twist.linear.x = 0.0
twist.linear.y = -0.2
twist.angular.z = -0.2
print "turn right"
else:
twist.linear.x = 0
twist.angular.z = 0
print "stop"
# 上下移動
if center_y < screen_center_h - offset_h:
twist.linear.z = 0.2
print "up up up"
elif screen_center_h - offset_h <= center_y <= screen_center_h + offset_h:
twist.linear.z = 0
print "keep"
elif center_y > screen_center_h + offset_h:
twist.linear.z = -0.2
print "down down down"
else:
twist.linear.z = 0
print "stop"
cv.waitKey(3)
# 發布運動指令
try:
self.cmd_pub.publish(twist)
except CvBridgeError as e:
print e
if __name__ == '__main__':
try:
rospy.init_node("cv_bridge_test")
rospy.loginfo("Starting cv_bridge_test node")
image_converter()
rospy.spin()
except KeyboardInterrupt:
print "Shutting down cv_bridge_test node."
cv.destroyAllWindows()
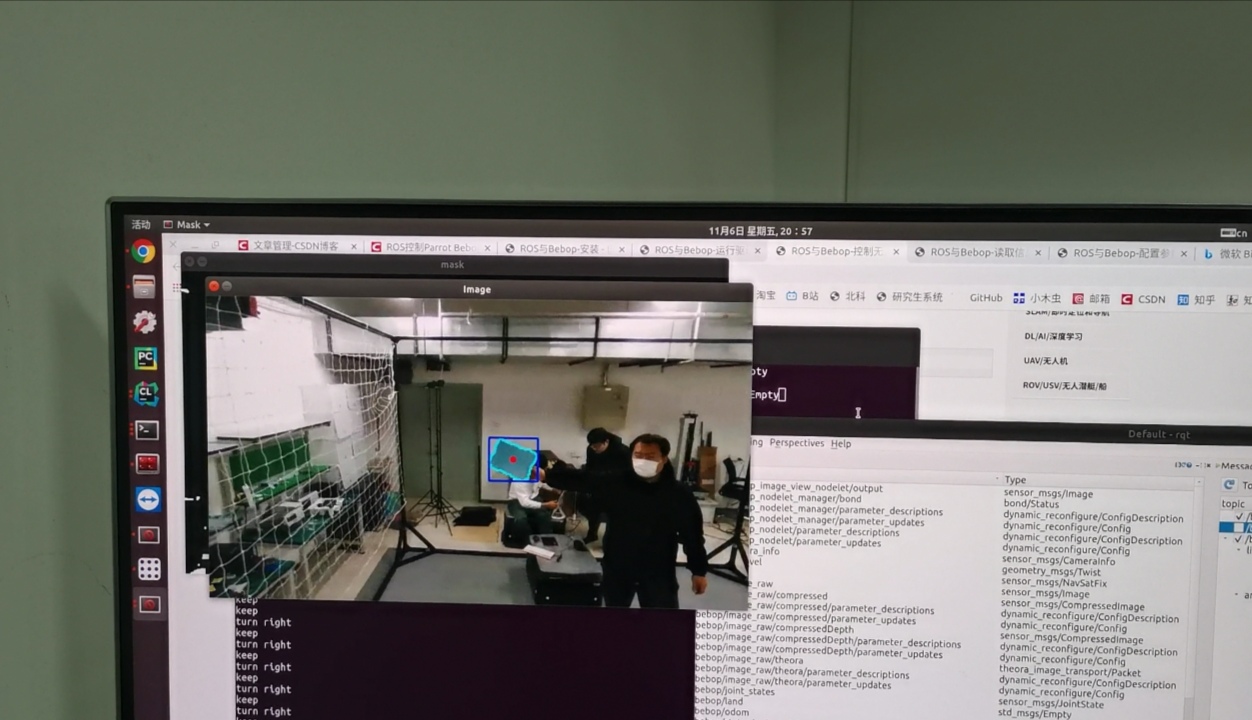
效果圖

2. 自主尋線
將上節的物體識別改為所尋線,運動控制左右移動/轉向,剩下就是調參的事情了
智能推薦
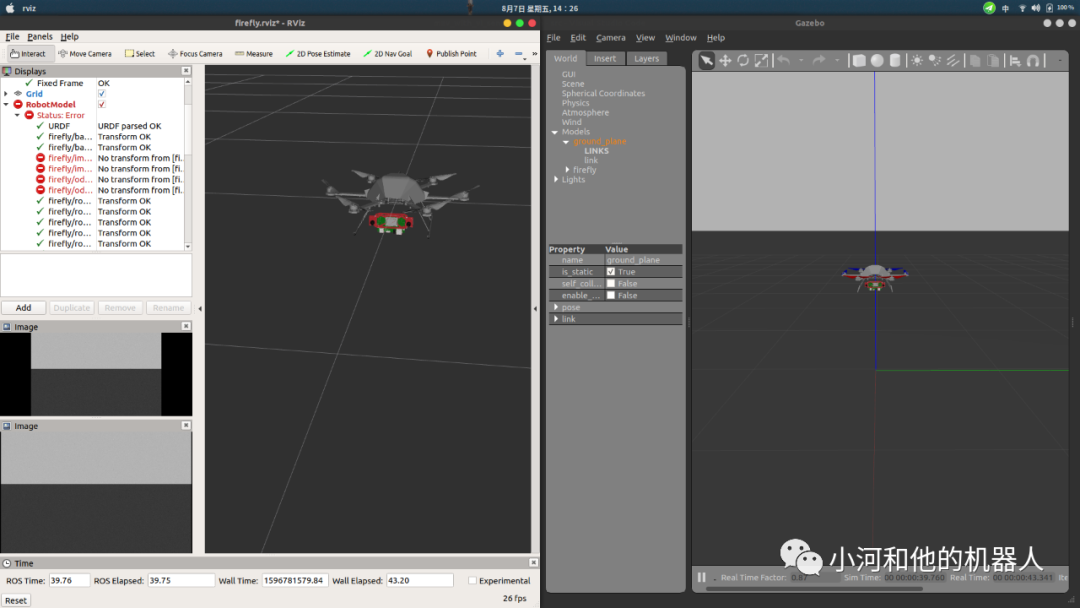
[ROS項目]無人機仿真(位置控制)
無人機仿真(位置控制) 本次項目所用的仿真環境是開源的Rotors功能包,初次了解無人機的控制,也是摸索小白,希望可以起到拋磚引玉的作用。 1. 安裝Rotors軟件功能包 首先需要建立ROS軟件包,并下載對應的Rotors的軟件功能包: 之后編譯git下來的代碼即可: 2. 運行Rotors的Firefly機器人的launch文件 Firefly機器人是一個六軸的機器人,帶有三個攝像頭,從rvi...
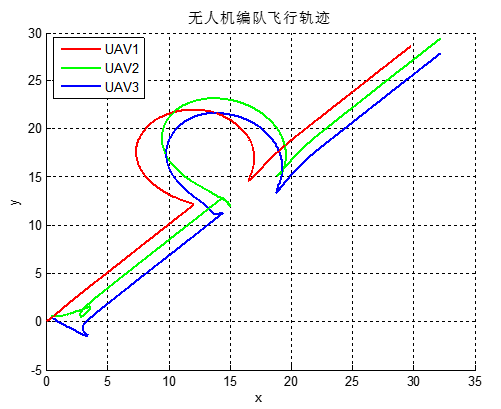
基于領導跟隨法的四旋翼無人機編隊matlab仿真
四旋翼無人機編隊控制matlab仿真 參數設置 位置模型 姿態模型 無人機編隊模型 編隊控制器 位置控制器 姿態控制器 matlab仿真圖 參數設置 位置模型 姿態模型 無人機編隊模型 編隊控制器 位置控制器 姿態控制器 matlab仿真圖 編隊二維平面仿真圖 無人機之間的速度誤差 無人機之間的距離變化(Leader與Follower2) 無人機之間的距離變化(Follower1與Follower...


freemarker + ItextRender 根據模板生成PDF文件
1. 制作模板 2. 獲取模板,并將所獲取的數據加載生成html文件 2. 生成PDF文件 其中由兩個地方需要注意,都是關于獲取文件路徑的問題,由于項目部署的時候是打包成jar包形式,所以在開發過程中時直接安照傳統的獲取方法沒有一點文件,但是當打包后部署,總是出錯。于是參考網上文章,先將文件讀出來到項目的臨時目錄下,然后再按正常方式加載該臨時文件; 還有一個問題至今沒有解決,就是關于生成PDF文件...
電腦空間不夠了?教你一個小秒招快速清理 Docker 占用的磁盤空間!
Docker 很占用空間,每當我們運行容器、拉取鏡像、部署應用、構建自己的鏡像時,我們的磁盤空間會被大量占用。 如果你也被這個問題所困擾,咱們就一起看一下 Docker 是如何使用磁盤空間的,以及如何回收。 docker 占用的空間可以通過下面的命令查看: TYPE 列出了docker 使用磁盤的 4 種類型: Images:所有鏡像占用的空間,包括拉取下來的鏡像,和本地構建的。 Con...
猜你喜歡

requests實現全自動PPT模板
http://www.1ppt.com/moban/ 可以免費的下載PPT模板,當然如果要人工一個個下,還是挺麻煩的,我們可以利用requests輕松下載 訪問這個主頁,我們可以看到下面的樣式 點每一個PPT模板的圖片,我們可以進入到詳細的信息頁面,翻到下面,我們可以看到對應的下載地址 點擊這個下載的按鈕,我們便可以下載對應的PPT壓縮包 那我們就開始做吧 首先,查看網頁的源代碼,我們可以看到每一...
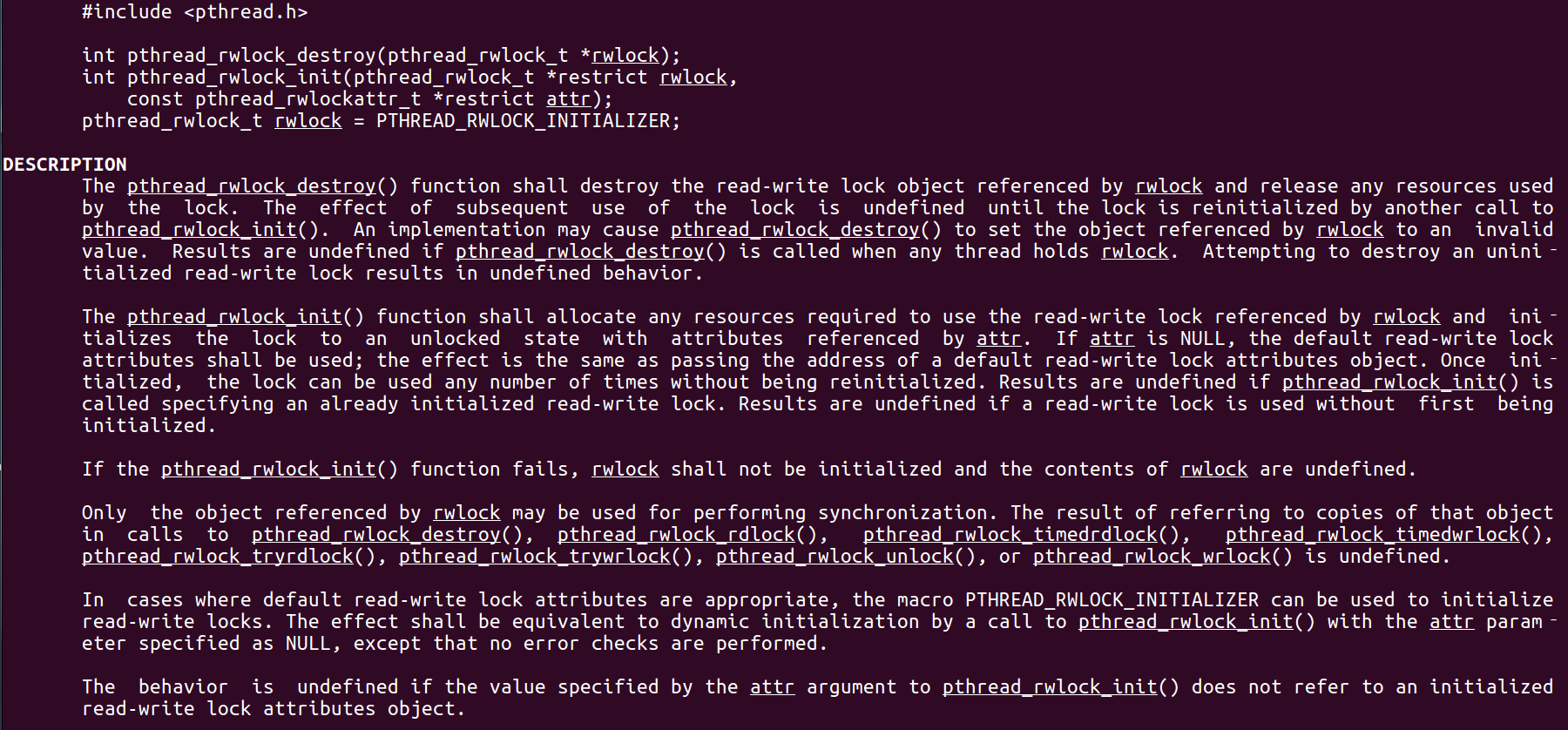
Linux C系統編程-線程互斥鎖(四)
互斥鎖 互斥鎖也是屬于線程之間處理同步互斥方式,有上鎖/解鎖兩種狀態。 互斥鎖函數接口 1)初始化互斥鎖 pthread_mutex_init() man 3 pthread_mutex_init (找不到的情況下首先 sudo apt-get install glibc-doc sudo apt-get install manpages-posix-dev) 動態初始化 int pthread_...
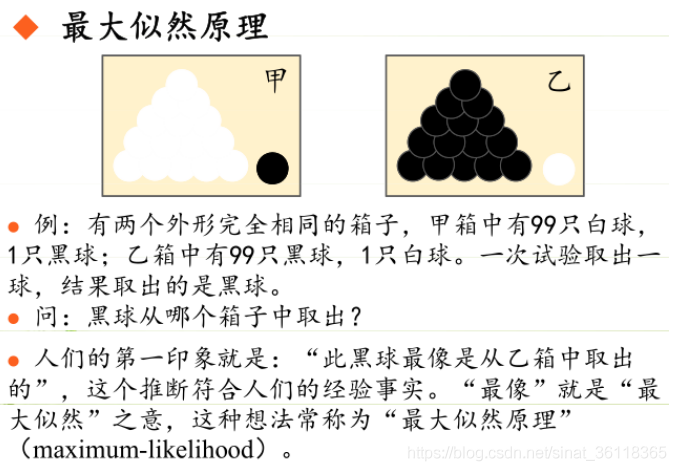
統計學習方法 - 樸素貝葉斯
引入問題:一機器在良好狀態生產合格產品幾率是 90%,在故障狀態生產合格產品幾率是 30%,機器良好的概率是 75%。若一日第一件產品是合格品,那么此日機器良好的概率是多少。 貝葉斯模型 生成模型與判別模型 判別模型,即要判斷這個東西到底是哪一類,也就是要求y,那就用給定的x去預測。 生成模型,是要生成一個模型,那就是誰根據什么生成了模型,誰就是類別y,根據的內容就是x 以上述例子,判斷一個生產出...

styled-components —— React 中的 CSS 最佳實踐
https://zhuanlan.zhihu.com/p/29344146 Styled-components 是目前 React 樣式方案中最受關注的一種,它既具備了 css-in-js 的模塊化與參數化優點,又完全使用CSS的書寫習慣,不會引起額外的學習成本。本文是 styled-components 作者之一 Max Stoiber 所寫,首先總結了前端組件化樣式中的最佳實踐原則,然后在此基...