ROS 無人機仿真系統3 —— 驗證仿真系統
1、平臺驗證
前面文檔搭建的仿真平臺是否正常,可以馬上允許一個launch文件進行驗證:
$ roslaunch rotors_gazebo mav_hovering_example.launch mav_name:=firefly world_name:=basic當你在終端運行該指令時,會不斷彈出信息,當出現報錯時說明平臺搭建有問題。我在這個過程中出現gazebo運行異常的問題,因為之前使用的是gazebo5,別人建議下使用了gazebo7就沒有出現gazebo報錯的問題。不過第一次啟動還是死在了gazebo啟動的畫面(網站上介紹是下載模型),這里請等1個h左右,如果還是啟動不了,就ctrl+c終結,然后重啟電腦再運行。我是第二次重啟之后就可以了。
仿真正常運行標志:
1)launch文件后不報錯;
2)運行仿真,飛行器上升后懸停飛行;
2、簡單控制
這里可以通過rostopic發布轉速信息:
$ rostopic pub /firefly/command/motor_speed mav_msgs/Actuators '{angular_velocities: [100, 100, 100, 100, 100, 100]}'運行正常的話,飛行器會下降一下再回到懸停的位置。這里沒有繼續下降的原因是該命令近發布了一次控制電機轉速的命令,可以使用下面指令,按照固定頻率發布指令:
$ rostopic pub /firefly/command/motor_speed mav_msgs/Actuators -r 50'{angular_velocities: [100, 100, 100, 100, 100, 100]}'上面指令的頻率是50Hz,若是將頻率設置為10Hz,會出現飛行器先下落后回到懸停位置,再下落,再回復的現象,這個是因為,發送飛行器電機轉速話題的節點有兩個,這里可以通過rqt_graph查看具體情況:
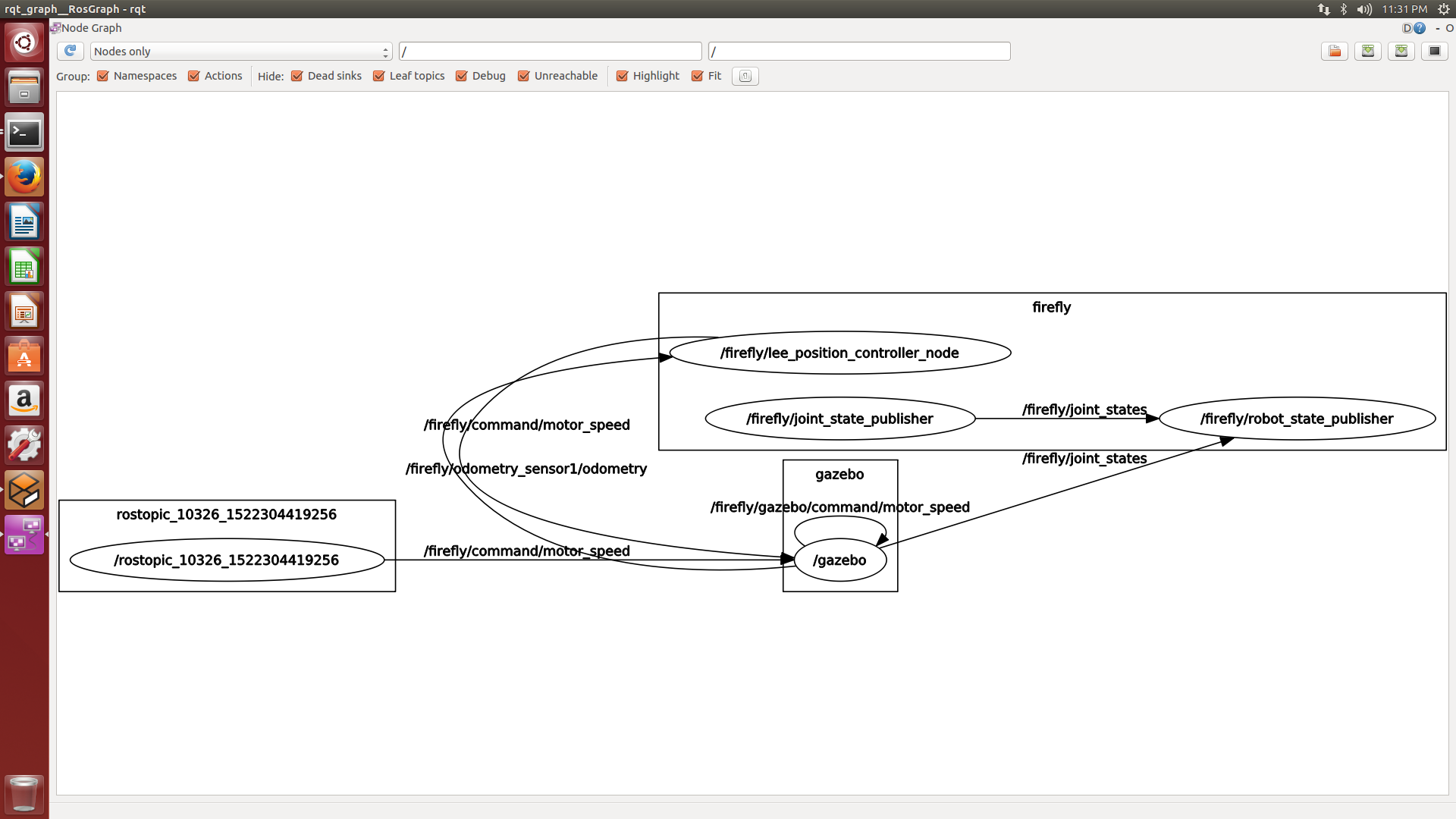
如圖中所示我們通過上述命令創建了/rostopic_103......這個節點,該節點發布了/firefly/command/motor_speed話題,但同時飛行器控制器節點/firefly/lee_position_controller_node也在發布該話題,我們可以通過rostopic echo /firefly/command/motor_speed可以查看到六旋翼六個電機轉速信息。飛行器轉速會時不時的出現為100(懸停540左右)。/firefly/lee_position_controller_node節點目的是控制飛行器懸停在某個位置,所以上述話題相當于是執行器出現了一個階躍擾動,最終導致飛行器反復上下飛行,比較有意思。這里可以使用rostopic/rosnode等命令查看相關信息。如rostopic hz 可以查看話題發布的頻率。
智能推薦

unity無人機3D仿真總結
開發平臺:unity2017 個人版 目前實現的效果: 無人機的模型是采用moya軟件制作。 控制代碼是使用C#語言。 總結C#語言的用法: (1)腳本的生命周期 1)Awake():在游戲運行時調用,用于初始化,在加載場景時運行。 2)Start()在游戲開始時執行一次,在Awake()函數后面執行。一般將變量初始化、游戲對象的獲取是放在這個函數中運行。 3)Update()在游戲的每一幀都會運...

【大疆無人機OnboardSDK-ROS系統搭建(二)】
【大疆無人機OnboardSDK-ROS系統搭建(二)】 硬件軟件參考平臺及設置參考上一篇博客。 不同之處,使用了OnboardSDK-ROS版本。區別于OnboardSDK,需要創建ROS工作空間,并將SDK源碼放入catkin_ws工作空間進行編譯執行。 具體步驟如下: 1.編譯djiosdk-core模塊library并安裝到系統。 安裝上一篇博客下載完成OnboardSDK之后需要對dji...


freemarker + ItextRender 根據模板生成PDF文件
1. 制作模板 2. 獲取模板,并將所獲取的數據加載生成html文件 2. 生成PDF文件 其中由兩個地方需要注意,都是關于獲取文件路徑的問題,由于項目部署的時候是打包成jar包形式,所以在開發過程中時直接安照傳統的獲取方法沒有一點文件,但是當打包后部署,總是出錯。于是參考網上文章,先將文件讀出來到項目的臨時目錄下,然后再按正常方式加載該臨時文件; 還有一個問題至今沒有解決,就是關于生成PDF文件...
電腦空間不夠了?教你一個小秒招快速清理 Docker 占用的磁盤空間!
Docker 很占用空間,每當我們運行容器、拉取鏡像、部署應用、構建自己的鏡像時,我們的磁盤空間會被大量占用。 如果你也被這個問題所困擾,咱們就一起看一下 Docker 是如何使用磁盤空間的,以及如何回收。 docker 占用的空間可以通過下面的命令查看: TYPE 列出了docker 使用磁盤的 4 種類型: Images:所有鏡像占用的空間,包括拉取下來的鏡像,和本地構建的。 Con...
猜你喜歡

requests實現全自動PPT模板
http://www.1ppt.com/moban/ 可以免費的下載PPT模板,當然如果要人工一個個下,還是挺麻煩的,我們可以利用requests輕松下載 訪問這個主頁,我們可以看到下面的樣式 點每一個PPT模板的圖片,我們可以進入到詳細的信息頁面,翻到下面,我們可以看到對應的下載地址 點擊這個下載的按鈕,我們便可以下載對應的PPT壓縮包 那我們就開始做吧 首先,查看網頁的源代碼,我們可以看到每一...
Linux C系統編程-線程互斥鎖(四)
互斥鎖 互斥鎖也是屬于線程之間處理同步互斥方式,有上鎖/解鎖兩種狀態。 互斥鎖函數接口 1)初始化互斥鎖 pthread_mutex_init() man 3 pthread_mutex_init (找不到的情況下首先 sudo apt-get install glibc-doc sudo apt-get install manpages-posix-dev) 動態初始化 int pthread_...
統計學習方法 - 樸素貝葉斯
引入問題:一機器在良好狀態生產合格產品幾率是 90%,在故障狀態生產合格產品幾率是 30%,機器良好的概率是 75%。若一日第一件產品是合格品,那么此日機器良好的概率是多少。 貝葉斯模型 生成模型與判別模型 判別模型,即要判斷這個東西到底是哪一類,也就是要求y,那就用給定的x去預測。 生成模型,是要生成一個模型,那就是誰根據什么生成了模型,誰就是類別y,根據的內容就是x 以上述例子,判斷一個生產出...

styled-components —— React 中的 CSS 最佳實踐
https://zhuanlan.zhihu.com/p/29344146 Styled-components 是目前 React 樣式方案中最受關注的一種,它既具備了 css-in-js 的模塊化與參數化優點,又完全使用CSS的書寫習慣,不會引起額外的學習成本。本文是 styled-components 作者之一 Max Stoiber 所寫,首先總結了前端組件化樣式中的最佳實踐原則,然后在此基...