ROS控制多架Bebop 2無人機
標簽: 機器人操作系統ROS ubuntu linux vim
前言:
本篇博客介紹了如何使用ROS同時控制多架Bebop 2無人機。
參考資料:https://ieeexplore.ieee.org/abstract/document/8613928
參考視頻:https://www.youtube.com/watch?v=P7SUFEKUP9Q, https://www.youtube.com/watch?v=nZaR-8Z515s&t=4s
一、安裝系統框架
- 安裝Ubuntu 18.04系統
參考:https://blog.csdn.net/u014113983/article/details/83049102 - 安裝ROS Melodic
參考:http://wiki.ros.org/melodic/Installation/Ubuntu
打開terminal,并輸入以下命令:$ sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list' $ sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654 $ sudo apt update $ sudo apt install ros-melodic-desktop-full $ sudo rosdep init $ rosdep update $ echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc $ source ~/.bashrc $ sudo apt install python-rosinstall python-rosinstall-generator python-wstool build-essential - 安裝catkin_tools
參考:https://catkin-tools.readthedocs.io/en/latest/index.html
打開terminal,并輸入以下命令:$ sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu `lsb_release -sc` main" > /etc/apt/sources.list.d/ros-latest.list' $ wget http://packages.ros.org/ros.key -O - | sudo apt-key add - $ sudo apt-get update $ sudo apt-get install python-catkin-tools
二、更改Bebop 2的內置IP地址
參考:https://blog.csdn.net/zhu_hai_csdn/article/details/104367043
-
按動一次Bebop 2的電源開關按鈕,并用USB數據線將其與電腦連接起來。
-
連續按動電源按鈕4次,這樣會建立電腦與Bebop 2內置模塊的有線連接。
-
在電腦端打開一個終端,執行以下命令:
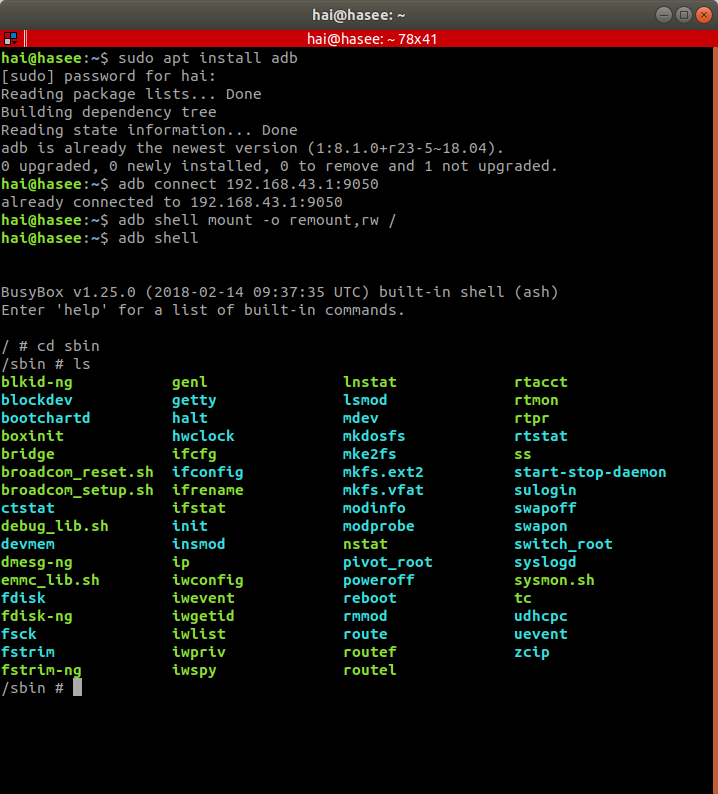
$ sudo apt install adb $ adb connect 192.168.43.1:9050 $ adb shell mount -o remount,rw / $ adb shell進入無人機的shell內部,進一步進入shell中的/sbin文件夾:
/ # cd sbin /sbin # ls可以看到/sbin文件下的文件,其中文件broadcom_setup.sh中包含了對無人機IP地址的設置。
繼續在終端執行下面的命令:/sbin # vi broadcom_setup.sh打開該文件:
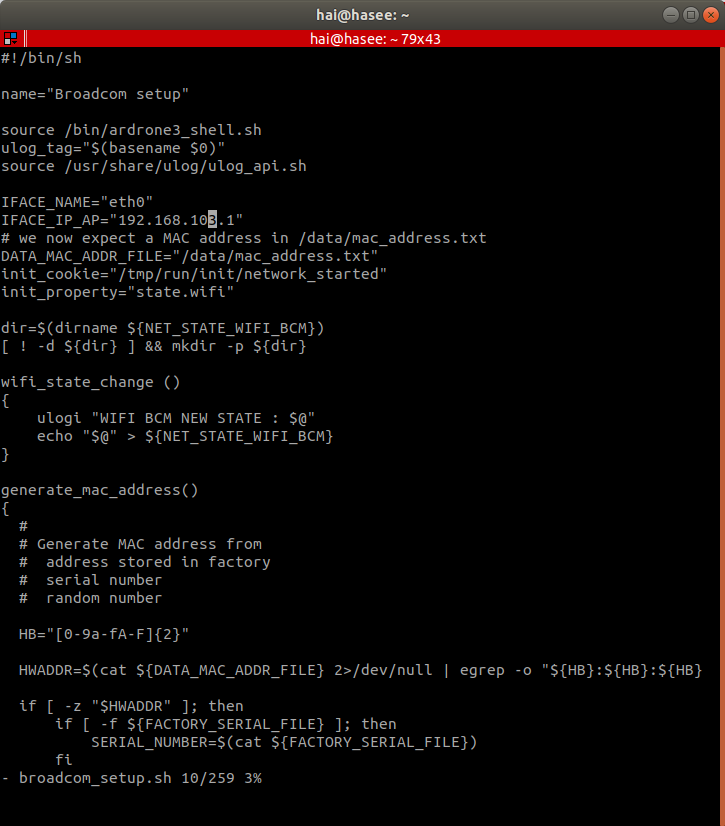
從該文件中找到IFACE IP AP="192.168.42.1"這一行,并將其改為自己需要的IP地址。比如改成IFACE IP AP=“192.168.x.1”,其中x表示用來區分不同無人機的數字,如101、102等等。 -
更改完成后退出shell:
/sbin # exit -
拔掉無人機與電腦之間連接的USB數據線,完成更改。
注意:如果有多架無人機,需要對每架無人機設置不同的IP地址!
三、安裝bebop_autonomy程序包
參考:https://blog.csdn.net/zhu_hai_csdn/article/details/104365272
- 打開一個終端,安裝基本的ros程序包編譯工具
$ sudo apt-get install build-essential python-rosdep python-catkin-tools - 安裝和編譯bebop_autonomy程序包
# Create and initialize the workspace $ mkdir -p ~/bebop_ws/src && cd ~/bebop_ws $ catkin init $ git clone https://github.com/AutonomyLab/bebop_autonomy.git src/bebop_autonomy # Update rosdep database and install dependencies (including parrot_arsdk) $ rosdep update $ rosdep install --from-paths src -i # Build the workspace $ catkin build - 在當前工作空間的devel/lib文件夾下新建一個鏈接,鏈接到/opt/ros/melodic/lib/parrot_arsdk文件夾,并將~/bebop_ws/devel/lib/parrot_arsdk添加到$LD_LIBRARY_PATH
$ cd ~/bebop_ws/devel/lib $ ln -s /opt/ros/melodic/lib/parrot_arsdk parrot_arsdk $ echo "export LD_LIBRARY_PATH="~/bebop_ws/devel/lib/parrot_arsdk:$LD_LIBRARY_PATH"" >> ~/.bashrc $ source ~/.bashrc
四、通過bebop_autonomy連接并控制無人機
-
修改launch文件
進入~/bebop_ws/src/bebop_autonomy/bebop_driver/launch文件家,可以看到一個默認的bebop_node.launch運行文件,在該文件夾下復制該文件,并重新命名,如bebop_node_3.launch,每架無人機均需要一個對應的該文件。然后打開該文件:
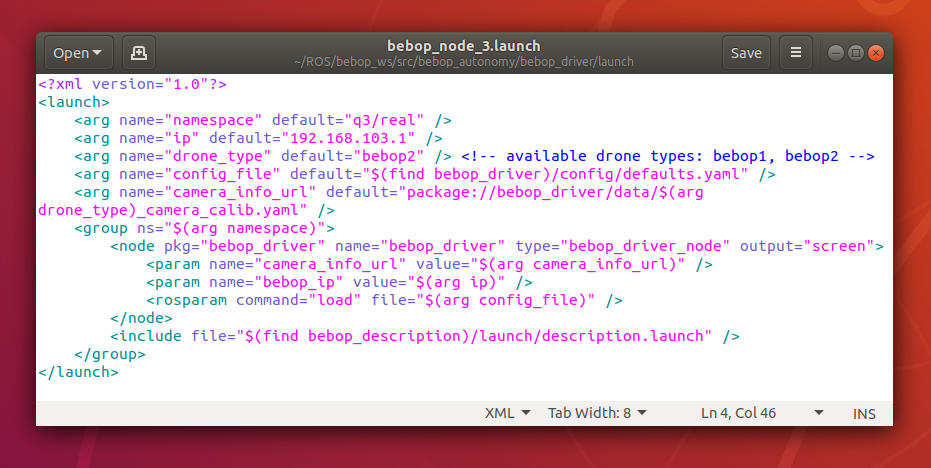
對其中的以下幾行進行修改:
(1)<arg name=“namespace” default=“bebop2” />,其中"bebop"表示該無人機相關的ros topic的命名空間,為了避免不同無人機之間的相互干擾,可將其改為"q3/real"。
(2)<arg name=“ip” default=“192.168.42.1” />,其中"192.168.42.1"表示該無人機的IP地址,這里需要將其改為我們前面自主設置的IP地址,如"192.168.103.1"。
(3)<arg name=“config_file” default="$(find bebop_driver)/config/defaults.yaml" />,其中defaults.yaml指定了運行該launch文件時載入的無人機參數配置,可以改為需要的參數配置文件,并在配置文件中更改相關參數。 -
修改 .yaml配置文件
進入~/bebop_ws/src/bebop_autonomy/bebop_driver/config文件夾,可以看到一個默認的defaults.yaml配置文件,打開該文件:
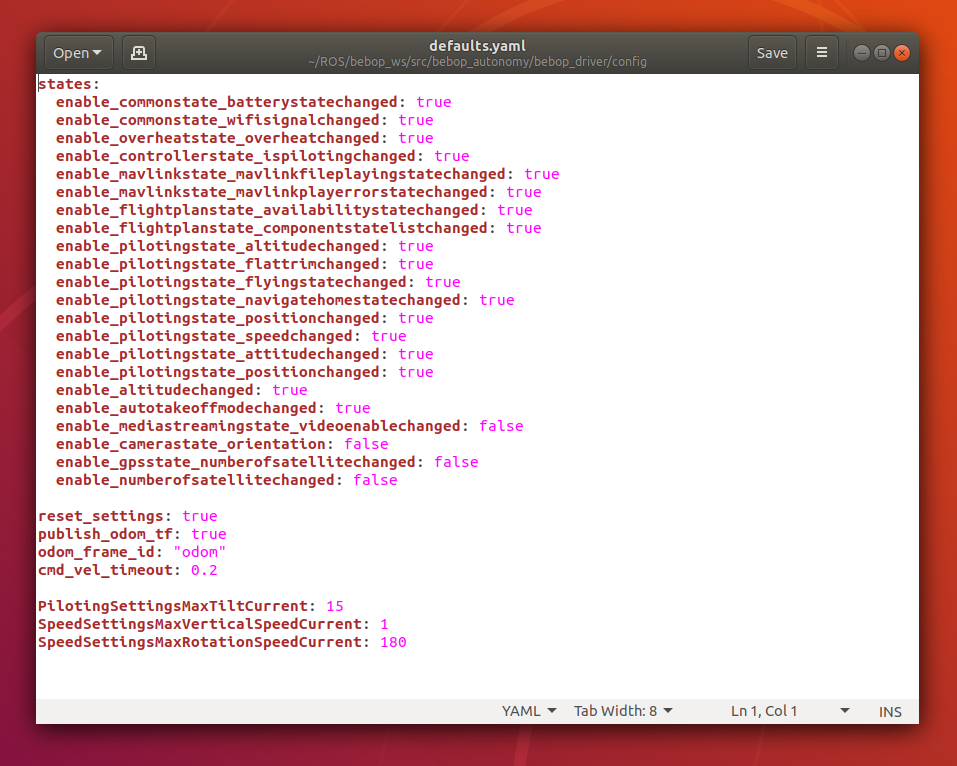
其中cmd_vel_timeout: 0.2表示無人機每收到一次cmd_vel指令后的最長執行時間。在原文件中添加以下三行:PilotingSettingsMaxTiltCurrent: 15 SpeedSettingsMaxVerticalSpeedCurrent: 1 SpeedSettingsMaxRotationSpeedCurrent: 180分別設置無人機的最大俯仰(滾轉)角度、最大豎直飛行速度和最大旋轉角速度。
-
與Bebop建立連接
(1)打開無人機,并連接無人機的WiFi。
(2)打開一個終端,啟動ROS。$ roscore(3)打開另一個終端,運行launch文件。
$ roslaunch bebop_driver bebop_node_3.launch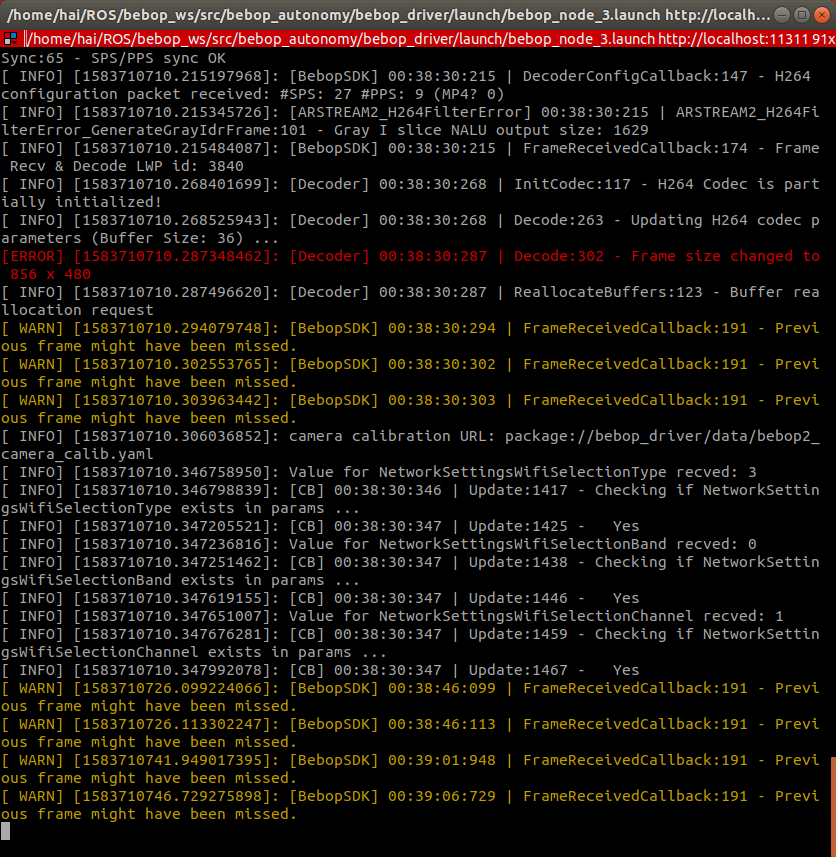
-
向Bebop發送指令
參考:https://bebop-autonomy.readthedocs.io/en/latest/piloting.html
以起飛、降落為例:$ rostopic pub --once q3/real/takeoff std_msgs/Empty $ rostopic pub --once q3/real/land std_msgs/Empty -
獲取Bebop圖像流信息
參考:https://bebop-autonomy.readthedocs.io/en/latest/reading.html
以獲取圖像流信息為例:$ rostopic echo /q3/real/image_raw
注意:如果要控制多架無人機,每架無人機都需要設置不同的IP,都需要通過一個WiFi串口與該無人機連接,然后在新的終端里運行對應的node_#.launch文件。
智能推薦


freemarker + ItextRender 根據模板生成PDF文件
1. 制作模板 2. 獲取模板,并將所獲取的數據加載生成html文件 2. 生成PDF文件 其中由兩個地方需要注意,都是關于獲取文件路徑的問題,由于項目部署的時候是打包成jar包形式,所以在開發過程中時直接安照傳統的獲取方法沒有一點文件,但是當打包后部署,總是出錯。于是參考網上文章,先將文件讀出來到項目的臨時目錄下,然后再按正常方式加載該臨時文件; 還有一個問題至今沒有解決,就是關于生成PDF文件...
電腦空間不夠了?教你一個小秒招快速清理 Docker 占用的磁盤空間!
Docker 很占用空間,每當我們運行容器、拉取鏡像、部署應用、構建自己的鏡像時,我們的磁盤空間會被大量占用。 如果你也被這個問題所困擾,咱們就一起看一下 Docker 是如何使用磁盤空間的,以及如何回收。 docker 占用的空間可以通過下面的命令查看: TYPE 列出了docker 使用磁盤的 4 種類型: Images:所有鏡像占用的空間,包括拉取下來的鏡像,和本地構建的。 Con...

requests實現全自動PPT模板
http://www.1ppt.com/moban/ 可以免費的下載PPT模板,當然如果要人工一個個下,還是挺麻煩的,我們可以利用requests輕松下載 訪問這個主頁,我們可以看到下面的樣式 點每一個PPT模板的圖片,我們可以進入到詳細的信息頁面,翻到下面,我們可以看到對應的下載地址 點擊這個下載的按鈕,我們便可以下載對應的PPT壓縮包 那我們就開始做吧 首先,查看網頁的源代碼,我們可以看到每一...
猜你喜歡
Linux C系統編程-線程互斥鎖(四)
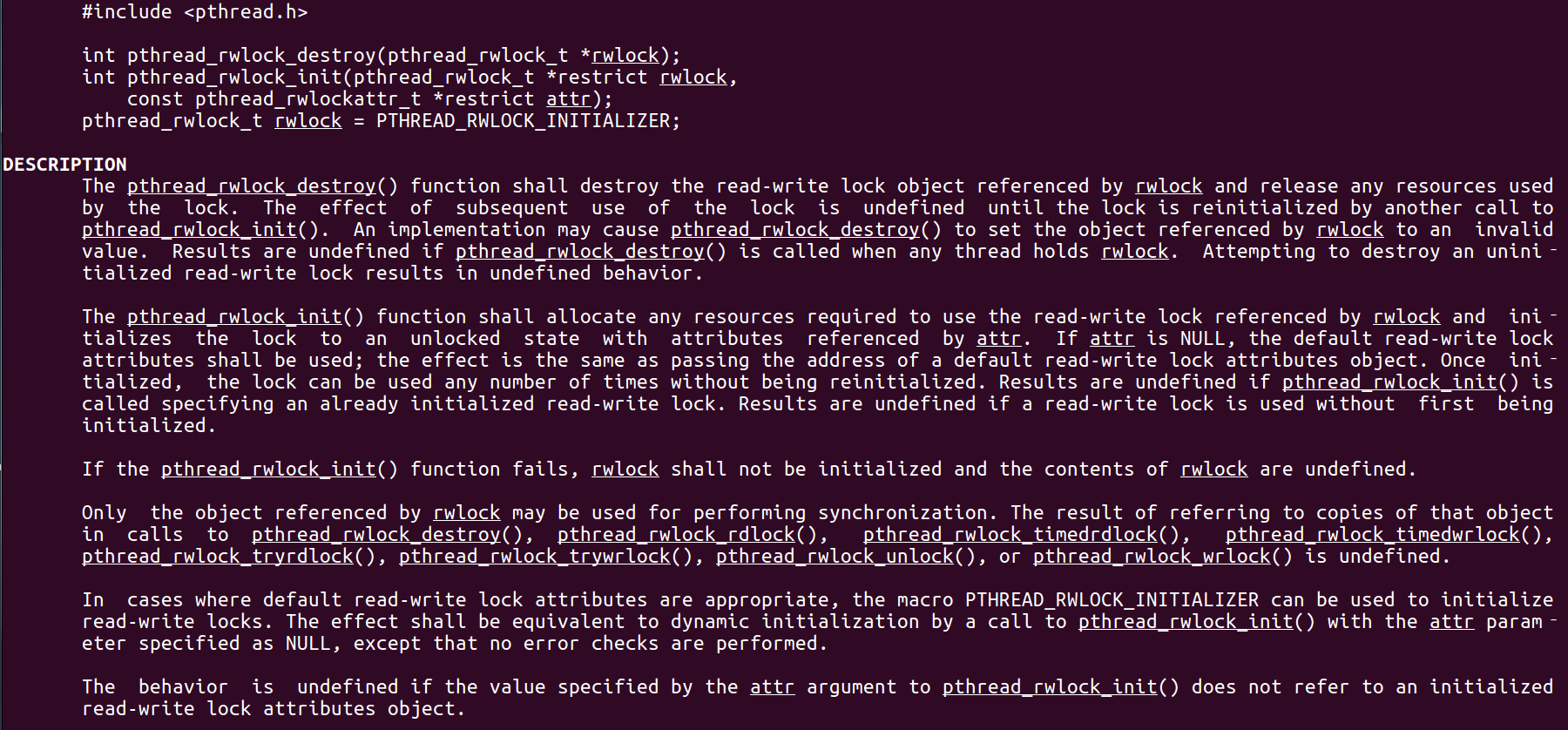
互斥鎖 互斥鎖也是屬于線程之間處理同步互斥方式,有上鎖/解鎖兩種狀態。 互斥鎖函數接口 1)初始化互斥鎖 pthread_mutex_init() man 3 pthread_mutex_init (找不到的情況下首先 sudo apt-get install glibc-doc sudo apt-get install manpages-posix-dev) 動態初始化 int pthread_...
統計學習方法 - 樸素貝葉斯
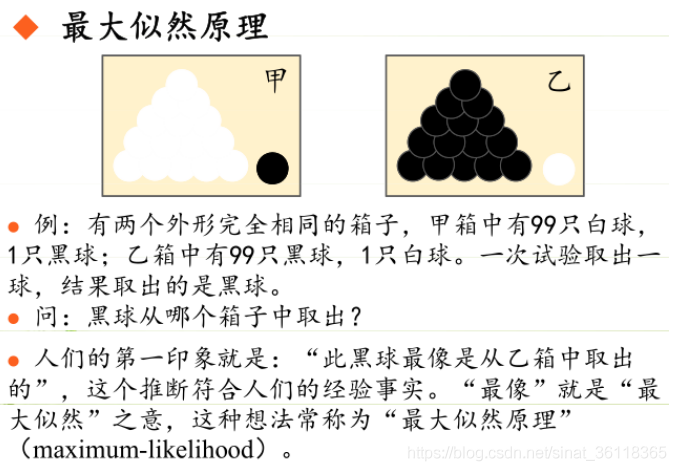
引入問題:一機器在良好狀態生產合格產品幾率是 90%,在故障狀態生產合格產品幾率是 30%,機器良好的概率是 75%。若一日第一件產品是合格品,那么此日機器良好的概率是多少。 貝葉斯模型 生成模型與判別模型 判別模型,即要判斷這個東西到底是哪一類,也就是要求y,那就用給定的x去預測。 生成模型,是要生成一個模型,那就是誰根據什么生成了模型,誰就是類別y,根據的內容就是x 以上述例子,判斷一個生產出...

styled-components —— React 中的 CSS 最佳實踐
https://zhuanlan.zhihu.com/p/29344146 Styled-components 是目前 React 樣式方案中最受關注的一種,它既具備了 css-in-js 的模塊化與參數化優點,又完全使用CSS的書寫習慣,不會引起額外的學習成本。本文是 styled-components 作者之一 Max Stoiber 所寫,首先總結了前端組件化樣式中的最佳實踐原則,然后在此基...

19.vue中封裝echarts組件
19.vue中封裝echarts組件 1.效果圖 2.echarts組件 3.使用組件 按照組件格式整理好數據格式 傳入組件 home.vue 4.接口返回數據格式...