無人機航測方案設計
主要工作內容
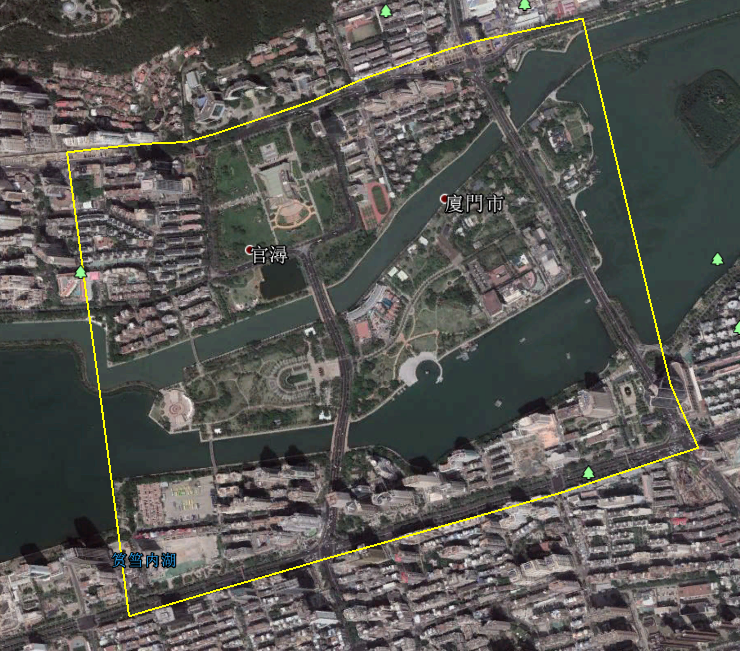
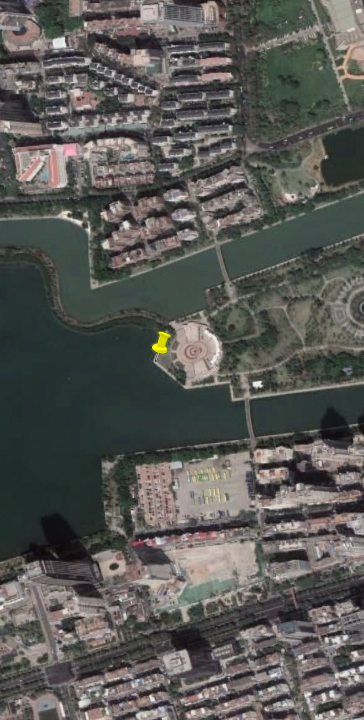
利用無人機數碼航空攝影技術手段完成廈門筼筜湖周邊地區,總面積約1.64平方公里,獲取筼筜湖畔范圍內約1.64平方公里真彩數碼航片,獲取筼筜湖畔范圍內約1.64平方公里1:1000數字線劃圖(DLG),生產數字高程模型(DEM),生成廈門筼筜湖周邊地區數字正射影像圖(DOM),地面分辨率優于0.1m的,成圖比例尺滿足1:1000的大比例尺航空影像工作任務。區域平均海拔高度約為10m,如下圖1所示為測區谷歌影像。
技術方案
(1)航空攝影:本次航攝資料利用大疆無人機搭載高分辨率數碼相機拍攝。按照1:1000比例尺成圖要求及無人機飛行相關要求設計飛行實施。
(2)像片控制測量:利用廈門CORS系統,采用RTK測量或雙頻接收機雙參考站模式按快速靜態方式施測。
采用區域網布點法,按照4-5條基線,逐條航線布設平高像片控制點的原則進行布點。
選刺執行GB/T7931-2008《1:500 1:1000 1:2000航空攝影測量外業規范》; 像控點的測量執行GB/T18314-2009《全球定位系統(GPS)測量規范》和CH/T2009-2010《全球定位系統實時動態測量(RTK)技術規范》。
(3)高程點測量:按照每幅圖10-15個點全野外進行實測,內業編輯上圖。
(4)調繪參照GB/T7931-2008《1:500 1:1000 1:2000航空攝影測量外業規范》執行。圖式符號執行GB/T 20257.1-2007《1:5001:1000 1:2000地形圖圖式》。
航空攝影技術參數設定
基本參數確定
航線設計需要確定的基本參數有重疊度、航攝比例尺、測區平均基準面、攝影機的焦距、影像的像幅大小。由基本參數計算出航線設計的參數有:在基準面上的飛行高度、航線位置、航向角及航線數、曝光的時間間隔、每條航線的曝光數、總曝光數。
(1)重疊度
重疊度包括航向重疊度和旁向重疊度,航向重疊60%-65%;旁向重疊30%-35%。航線設計是參照平均基準面進行的,地面起伏、影像傾斜角、飛行偏離航線、航高和地速變化等對重疊度均有影響。在航線規劃時,可以預先考慮修正的是由地形起伏引起的變化,地形起伏對重疊度的影響不容忽視。地形起伏的高差對重疊度的影響如下式給出:
Px =P´x +(1- P´x)·?h/H
(5-1)
Py = Py + (1- P´y)·?h/H
Px為考慮地形起伏影響時,航向重疊度實際值;P'X為航向重疊度理論值;Py為考慮地形起伏影響時,旁向重疊度實際值;P'y為旁向重疊度理論值;H為飛行的相對高度(相對基準面的高度,選取基準面);?h為測區地形相對基準面的變化值。
(2)航攝比例尺
航攝像片的比例尺是航空攝影的一個最基本的集合要素,是指像片上的一個單位距離所代表的實際地面距離,表示為:
m = p/GSD (5-2)
m為航攝比例尺;GSD為影像地面分辨率;p為單位像元大小。實際攝影比例尺在像片上處處不相等,一般采用平均比例尺表示:
m平均= f/H (5-3)
f為攝影機的焦距;H為飛行的相對高度。
(3)測區基準面確定
一般情況下航測作業的基準面并非平均海面,通常需要根據測區地形特點選定的一個平面作為基準面。
h基 =(h高 + h低) (5-4)
h基為平均基準面高度;h高為區域內最高點的平均高程;h低為區域內最低點的平均高程。
航線設計參數
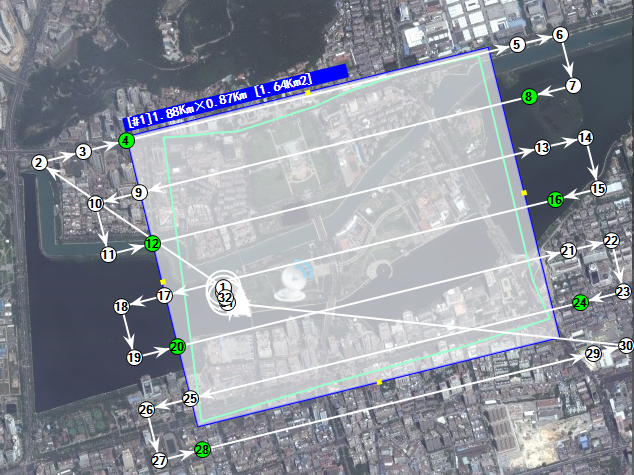
航拍飛行計劃參數設置如圖所示。航攝區域要生成航攝航線,必須進行航拍參數的設置。相機型號選擇Canon_EOS_5D_Mark_Ⅲ,安裝方式選擇橫放,以及任務作業時的成圖比例尺為1:1000,地面站分辨率為0.1米,航向重疊率為65%和旁向重疊率60%。通過上述的參數進行自動計算出拍照間距134.4米、航線間距230.4米和相對航高384米,輸入被拍攝區域地面高度約10米。最后選擇航線飛行進入方向。
建立的航攝飛行計劃中,航拍規劃區域以外的航線延伸點為設置的轉彎引導點,其位置是根據設置的最小轉彎半徑和航線間距生成的,目的是為更平滑的切換工作航線,本次設計最小盤旋半徑為60米。航拍參數設置如圖5-1所示。

飛行計劃參數設置完成后,自動生成針對本區域的航攝飛行計劃,如圖5-2所示。

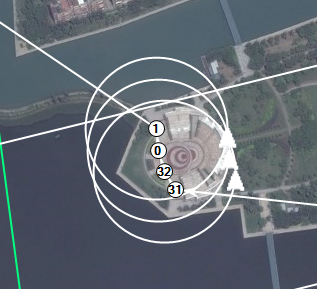
但起飛點和降落點需要調整。在生成的航攝飛行計劃中,有四個點具有特殊意義,其中0點為設置的應急航路點點,其高度設置為作業航線高度,放置在地面站附近,并設置成無限盤旋屬性;1點為航攝起飛高度修正點,其高度與航攝工作面高度一致,當無人機由垂轉平后,將首先向1點導航,并將在1點進行盤旋爬升,直到高度到達任務航線高度,導向2號航路點;圖中31、32點表示生成的最后兩個航路點,其中31點為返航預回收點,其高度與航攝工作面高度一致,為航攝任務完成后的返航點,而32點為降落前調整點,如圖5-3所示。
航線設計一般應沿東西方向進行。考慮到學院地形的高程變化不大且范圍較小,測區矩形范圍偏東北-西南方位,因此本次航線設計總體以東西方向進行,航線偏向東北-西南,航帶規劃示意圖如下圖5-4。
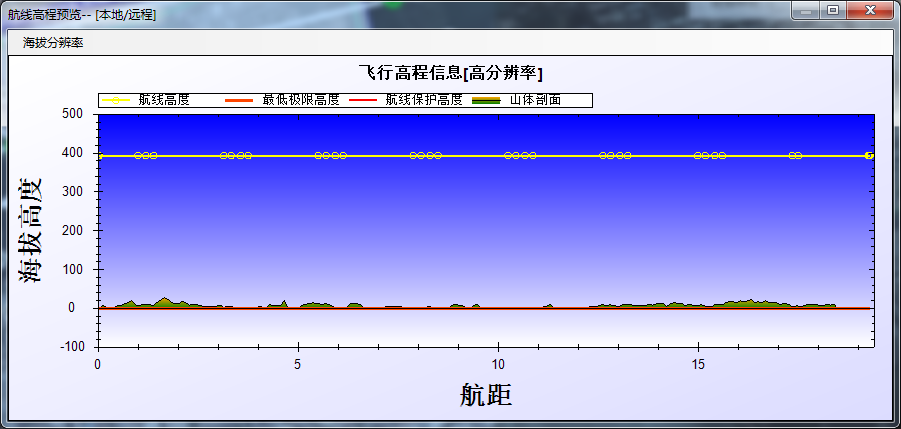
在飛行計劃規劃過程中,用戶需要對飛行環境進行全方面考慮,其中飛行計劃沿途的地形(高程)對飛行器的安全飛行尤其重要,飛行計劃須避開可能存在的山峰地貌。如圖5-5所示,點擊離線高程預覽后,圖中黃色曲線為飛行計劃各航路點高度曲線,其可與高度曲線相對照。
像控點布設
像控點測量是指根據像片上內業的布點方案,在實地根據影像的灰度和形狀找到并確定像控點的位置,測量并記錄該點平面坐標及其高程。目前像控作業基本采用GPS進行測量,GPS定位技術以其靈活方便、作業周期短、勞動強度低等優點廣泛應用于諸多測繪領域,極大地提高了工作效率。但是像控數據的載體卻仍舊停留于紙質。不少作業單位在外業像控點測量時,仍舊是由作業人員拿著紙質相片到野外根據設計的位置選點、測量, 然后在相片上刺點,并在相片反面繪制點位略圖和點位說明。這樣的工作模式會產生一系列的問題:(1)相片存在著洗印成本,查找和管理均不便。(2)不同的作業小組有可能會用到同一張相片,存在受相片資源限制,影響工作進度。(3)紙質的影像,不可能放得很大,影像細節常常難以辨認,影響刺點精度,甚至導致返工。同時也會帶來內業判讀的不便。(4)作業小組回到室內還需要重辨認、繪制,產生了重復勞動的中間環節, 也增加了成果質量不高的風險。為了解決以上問題,通過實行航測外業作業數字化,以節約成本,簡化作業流程,提高成果精度,真正達到航測內外業一體化的目的。
像控點的點位和目標要求
在內業設計階段,對像控點的位置選取有比較嚴格的要求,要求平面點位選取在影像清晰的明顯地物點、接近正交的線狀地物交點、地物拐角點或固定的點狀地物上,高程點選在局部高程變化小且點位周圍相對平坦的地區,平高控制點則選在同時滿足平面和高程點的要求,像控點在相鄰像片上均清晰可見,并選擇最清晰的一張作主刺片。內業設計人員通過軟件,打開指定的影像以及相鄰像片,進行布點設計,建立點號與相關像片的結合圖表關系;外業工作人員攜帶平板電腦到外業,軟件自動依據點號,打開相關像片,測量完成后,直接在軟件的影像上刺點以及錄入點位詳細信息;最后將保存的像控點數據提交內業,做加密。
像控點的布設利用廈門CORS采用區域網布設,選刺執行CH/Z 3004-2010《低空數字航空攝影測量外業規范》;像控點的測量執行CH/T2009-2010《全球定位系統實時動態測量(RTK)技術規范》,高程采用GPS擬合高程。
控制點如布在道路上,可用紅漆畫紅十字;如布設在泥地,則需要用膩子粉畫設。所有控制點均采用GPS-RTK方式測量,坐標系統為廈門92坐標系,平面精度和高程精度需滿足制作1∶1000 DOM的要求。
在內業,大致繪制確定像控點布設位置,實際點位需外業布設量測。如圖6-1為在谷歌影像上初步選取的控制點,增刪、最終確定待外業根據實際情況確定。

智能推薦


freemarker + ItextRender 根據模板生成PDF文件
1. 制作模板 2. 獲取模板,并將所獲取的數據加載生成html文件 2. 生成PDF文件 其中由兩個地方需要注意,都是關于獲取文件路徑的問題,由于項目部署的時候是打包成jar包形式,所以在開發過程中時直接安照傳統的獲取方法沒有一點文件,但是當打包后部署,總是出錯。于是參考網上文章,先將文件讀出來到項目的臨時目錄下,然后再按正常方式加載該臨時文件; 還有一個問題至今沒有解決,就是關于生成PDF文件...
電腦空間不夠了?教你一個小秒招快速清理 Docker 占用的磁盤空間!
Docker 很占用空間,每當我們運行容器、拉取鏡像、部署應用、構建自己的鏡像時,我們的磁盤空間會被大量占用。 如果你也被這個問題所困擾,咱們就一起看一下 Docker 是如何使用磁盤空間的,以及如何回收。 docker 占用的空間可以通過下面的命令查看: TYPE 列出了docker 使用磁盤的 4 種類型: Images:所有鏡像占用的空間,包括拉取下來的鏡像,和本地構建的。 Con...

requests實現全自動PPT模板
http://www.1ppt.com/moban/ 可以免費的下載PPT模板,當然如果要人工一個個下,還是挺麻煩的,我們可以利用requests輕松下載 訪問這個主頁,我們可以看到下面的樣式 點每一個PPT模板的圖片,我們可以進入到詳細的信息頁面,翻到下面,我們可以看到對應的下載地址 點擊這個下載的按鈕,我們便可以下載對應的PPT壓縮包 那我們就開始做吧 首先,查看網頁的源代碼,我們可以看到每一...
猜你喜歡
Linux C系統編程-線程互斥鎖(四)
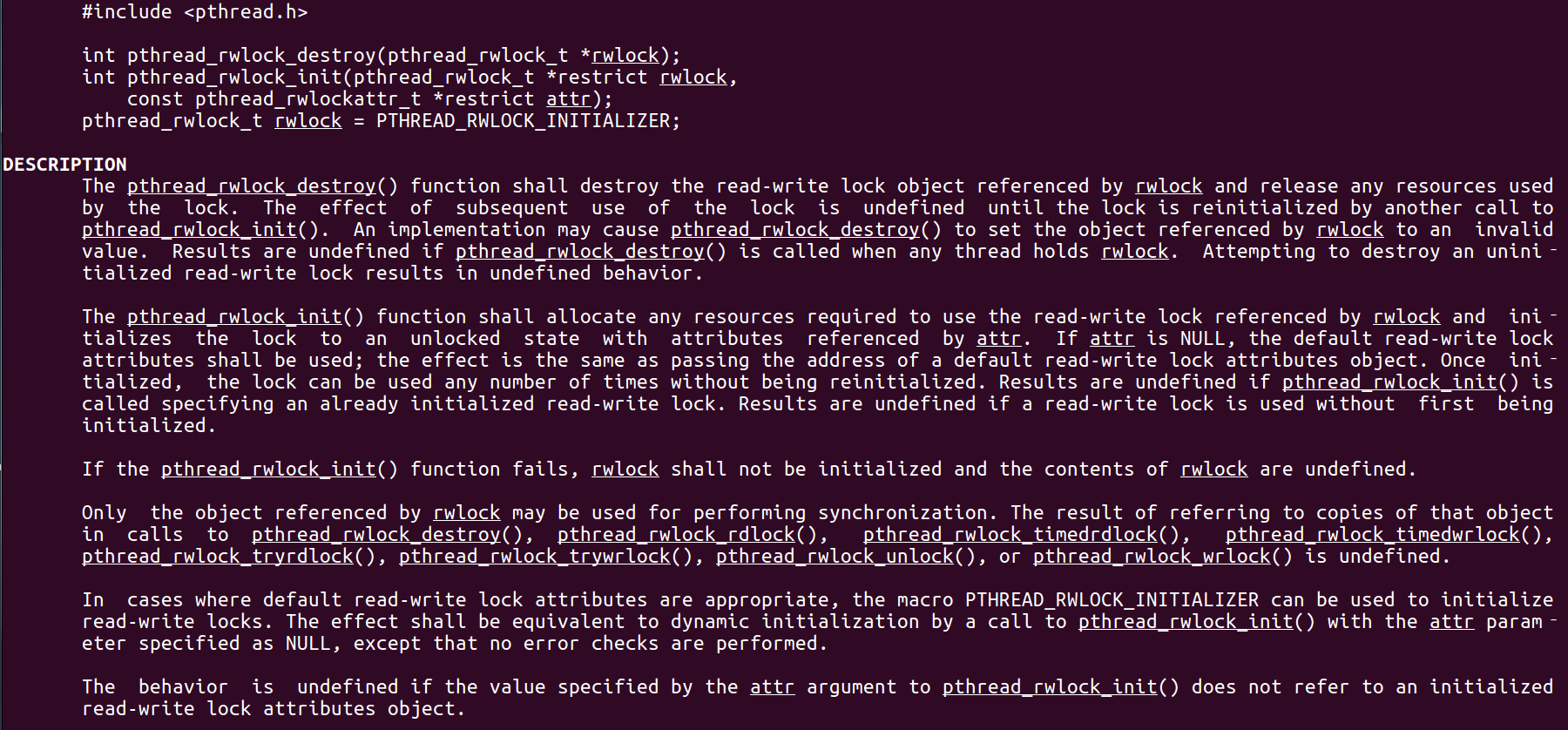
互斥鎖 互斥鎖也是屬于線程之間處理同步互斥方式,有上鎖/解鎖兩種狀態。 互斥鎖函數接口 1)初始化互斥鎖 pthread_mutex_init() man 3 pthread_mutex_init (找不到的情況下首先 sudo apt-get install glibc-doc sudo apt-get install manpages-posix-dev) 動態初始化 int pthread_...
統計學習方法 - 樸素貝葉斯
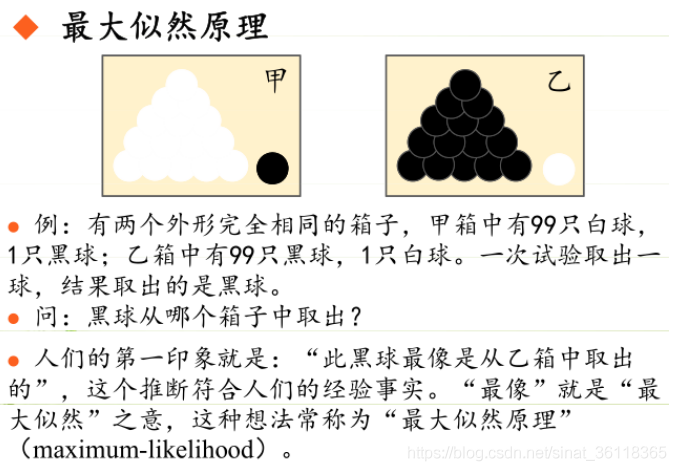
引入問題:一機器在良好狀態生產合格產品幾率是 90%,在故障狀態生產合格產品幾率是 30%,機器良好的概率是 75%。若一日第一件產品是合格品,那么此日機器良好的概率是多少。 貝葉斯模型 生成模型與判別模型 判別模型,即要判斷這個東西到底是哪一類,也就是要求y,那就用給定的x去預測。 生成模型,是要生成一個模型,那就是誰根據什么生成了模型,誰就是類別y,根據的內容就是x 以上述例子,判斷一個生產出...

styled-components —— React 中的 CSS 最佳實踐
https://zhuanlan.zhihu.com/p/29344146 Styled-components 是目前 React 樣式方案中最受關注的一種,它既具備了 css-in-js 的模塊化與參數化優點,又完全使用CSS的書寫習慣,不會引起額外的學習成本。本文是 styled-components 作者之一 Max Stoiber 所寫,首先總結了前端組件化樣式中的最佳實踐原則,然后在此基...

19.vue中封裝echarts組件
19.vue中封裝echarts組件 1.效果圖 2.echarts組件 3.使用組件 按照組件格式整理好數據格式 傳入組件 home.vue 4.接口返回數據格式...