DJI OSDK 與大疆DJI M100通信的問題記錄
標簽: DJI M100 Onboard SDK Intel nuc
配置好DJI SDK之后,運行以下指令啟動SDK對無人機的控制
cd SDK_ws/
source devel/setup.bash
roslaunch dji_sdk sdk.launch
cd SDK_ws/
source devel/setup.bash
rosrun dji_sdk_demo demo_local_position_control
問題1:啟動第一條指令roslaunch dji_sdk sdk.launch后終端里報錯:
STATUS/1 @ init, L55: Attempting to open device /dev/ttyUSB0 with baudrate 230400...
ERRORLOG/1 @ _serialOpen, L175: cannot open device /dev/ttyUSB0
ERRORLOG/1 @ init, L60: ...Failed to start serial
ERRORLOG/1 @ sendData, L407: Port closed.
ERRORLOG/1 @ sendData, L411: Open Protocol cmd send failed, send_len: -1 packet_len: 19
ERRORLOG/1 @ getDroneVersion, L1418: Drone version not obtained! Please do not proceed.
Possible reasons:
Serial port connection:
* SDK is not enabled, please check DJI Assistant2 -> SDK -> [v] Enable API Control.
* Baudrate is not correct, please double-check from DJI Assistant2 -> SDK -> baudrate.
* TX and RX pins are inverted.
* Serial port is occupied by another program.
* Permission required. Please do 'sudo usermod -a -G dialout $USER' (you do not need to replace $USER with your username). Then logout and login again
[ERROR] [1605924280.993754831]: drone activation error
[ERROR] [1605924280.993948247]: Vehicle initialization failed
如下圖所示:
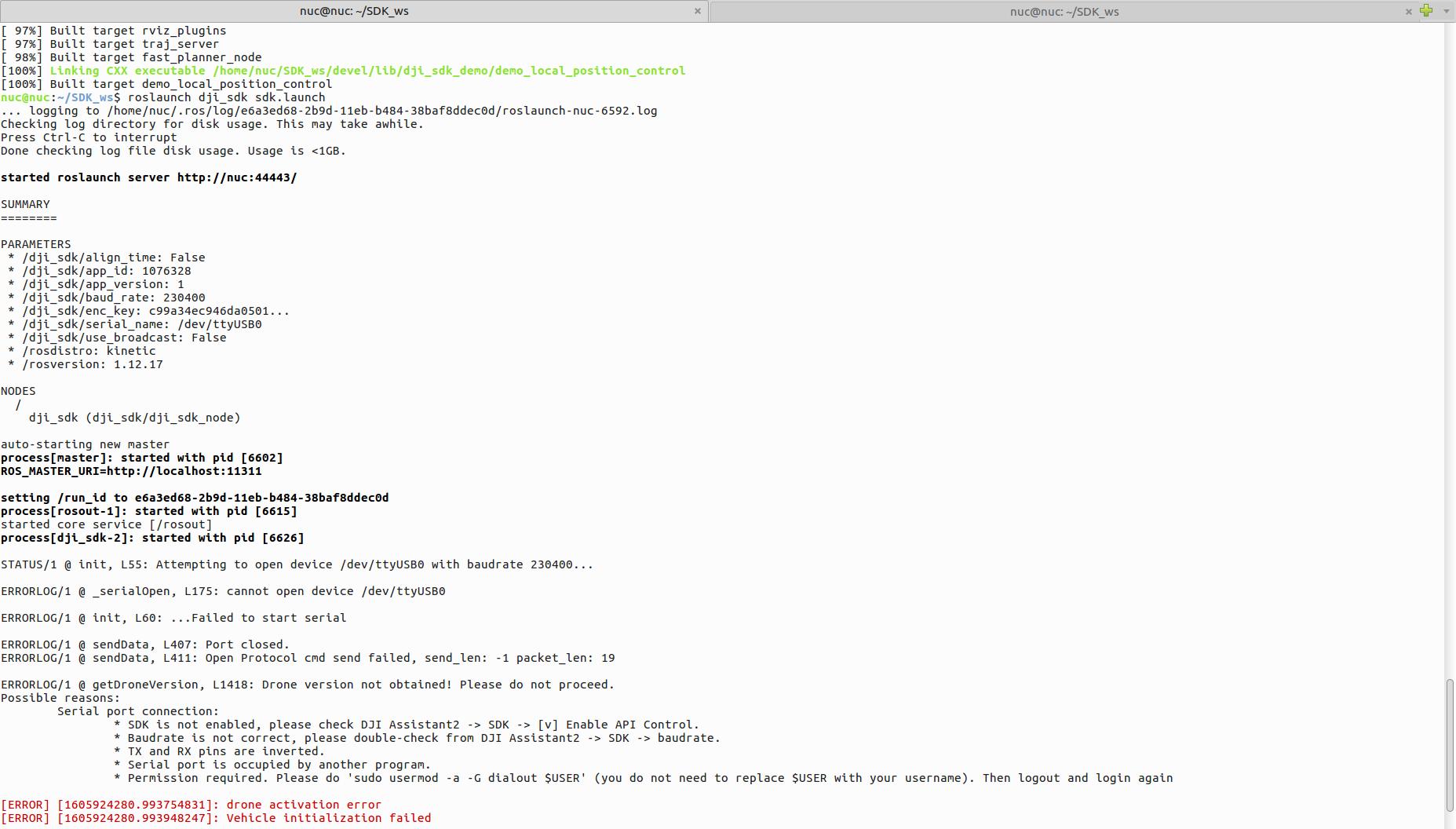
出現此問題的原因可能有以下幾種:
①USB-TTL線沒有插上或者出現了故障,如果確定是線的原因,可以重新拔下重新插上或者換一條線試試.
問題2:終端里報錯:
STATUS/1 @ init, L55: Attempting to open device /dev/ttyUSB0 with baudrate 230400...
STATUS/1 @ init, L65: ...Serial started successfully.
ERRORLOG/1 @ getDroneVersion, L1418: Drone version not obtained! Please do not proceed.
Possible reasons:
Serial port connection:
* SDK is not enabled, please check DJI Assistant2 -> SDK -> [v] Enable API Control.
* Baudrate is not correct, please double-check from DJI Assistant2 -> SDK -> baudrate.
* TX and RX pins are inverted.
* Serial port is occupied by another program.
* Permission required. Please do 'sudo usermod -a -G dialout $USER' (you do not need to replace $USER with your username). Then logout and login again
[ERROR] [1605926118.722261171]: drone activation error
[ERROR] [1605926118.722432568]: Vehicle initialization failed
此時相比于錯誤1,USB口能進行通訊了,說明USB-TTL線插上了切沒問題,但是依舊不能于無人機進行通訊:
原因:
可能是無人機沒有開機.
問題3:
STATUS/1 @ init, L55: Attempting to open device /dev/ttyUSB0 with baudrate 230400...
STATUS/1 @ init, L65: ...Serial started successfully.
STATUS/1 @ parseDroneVersionInfo, L727: Device Serial No. = 041DF30189
STATUS/1 @ parseDroneVersionInfo, L729: Hardware = M100
STATUS/1 @ parseDroneVersionInfo, L730: Firmware = 3.1.10.0
STATUS/1 @ parseDroneVersionInfo, L733: Version CRC = 0xA6453AAC
STATUS/1 @ initSubscriber, L778: Telemetry subscription mechanism is not supported on this platform!
STATUS/1 @ initMFIO, L981: MFIO is not supported on this platform!
STATUS/1 @ initHardSync, L1077: Hardware Sync is not supported on this platform!
STATUS/1 @ activate, L1313: version 0x3010A00
STATUS/1 @ activate, L1326: Activation successful
[ INFO] [1605926303.238949063]: drone activated
[ INFO] [1605926303.311617777]: Use legacy data broadcast to get telemetry data!
相比于前兩個錯誤,接口能通訊了,而且能獲取無人機的信息,此時說明借口沒問題,切無人機也正常開機了,但是無法進行控制.
原因:
遙控器的問題:
1遙控器沒有打開
2遙控器沒有撥到F,即開發者模式.
3遙控器沒有和無人機正常通訊.
此時你能看到無人機的信號燈是黃色的,如果遙控器打開,且正常和無人機連接上,無人機的信號燈會變成綠色.
無人機和SDK通訊正常且能正常控制無人機時,運行第一條指令: roslaunch dji_sdk sdk.launch
終端的輸出如下:
STATUS/1 @ init, L55: Attempting to open device /dev/ttyUSB0 with baudrate 230400...
STATUS/1 @ init, L65: ...Serial started successfully.
STATUS/1 @ parseDroneVersionInfo, L727: Device Serial No. = 041DF30189
STATUS/1 @ parseDroneVersionInfo, L729: Hardware = M100
STATUS/1 @ parseDroneVersionInfo, L730: Firmware = 3.1.10.0
STATUS/1 @ parseDroneVersionInfo, L733: Version CRC = 0xA6453AAC
STATUS/1 @ initSubscriber, L778: Telemetry subscription mechanism is not supported on this platform!
STATUS/1 @ initMFIO, L981: MFIO is not supported on this platform!
STATUS/1 @ initHardSync, L1077: Hardware Sync is not supported on this platform!
STATUS/1 @ activate, L1313: version 0x3010A00
STATUS/1 @ activate, L1326: Activation successful
[ INFO] [1605926715.967287953]: drone activated
[ INFO] [1605926716.071944781]: Use legacy data broadcast to get telemetry data!
注意:
如果你是在室內測試SDK,切記先把四個螺旋槳先卸下來,以免傷人,如果想看無人機的運動情況,可以把無人機連接模擬器DJI Assitant2.
然后啟動一個名為demo_local_position_control的demo , 指令為rosrun dji_sdk_demo demo_local_position_control:
就可發現無人機的啟動了.
智能推薦

DJI SDK之導入篇--將SDK配置到自己的應用程序中
本文以大疆官方給出的Android Mobile SDK為例子,講解怎么在自己的應用程序中導入該SDK,以及注冊生產應用程序密匙。本文內容參考官方的英文文檔,需要的朋友可以去文末的網址進行查看。 包含如下步驟: 步驟1: 新建一個工程 步驟2:更新build.gradle 步驟3:進行同步 步驟4:新建一個Java類并繼承Application。 步驟5:進行Activity的設置工作 步驟6:配...
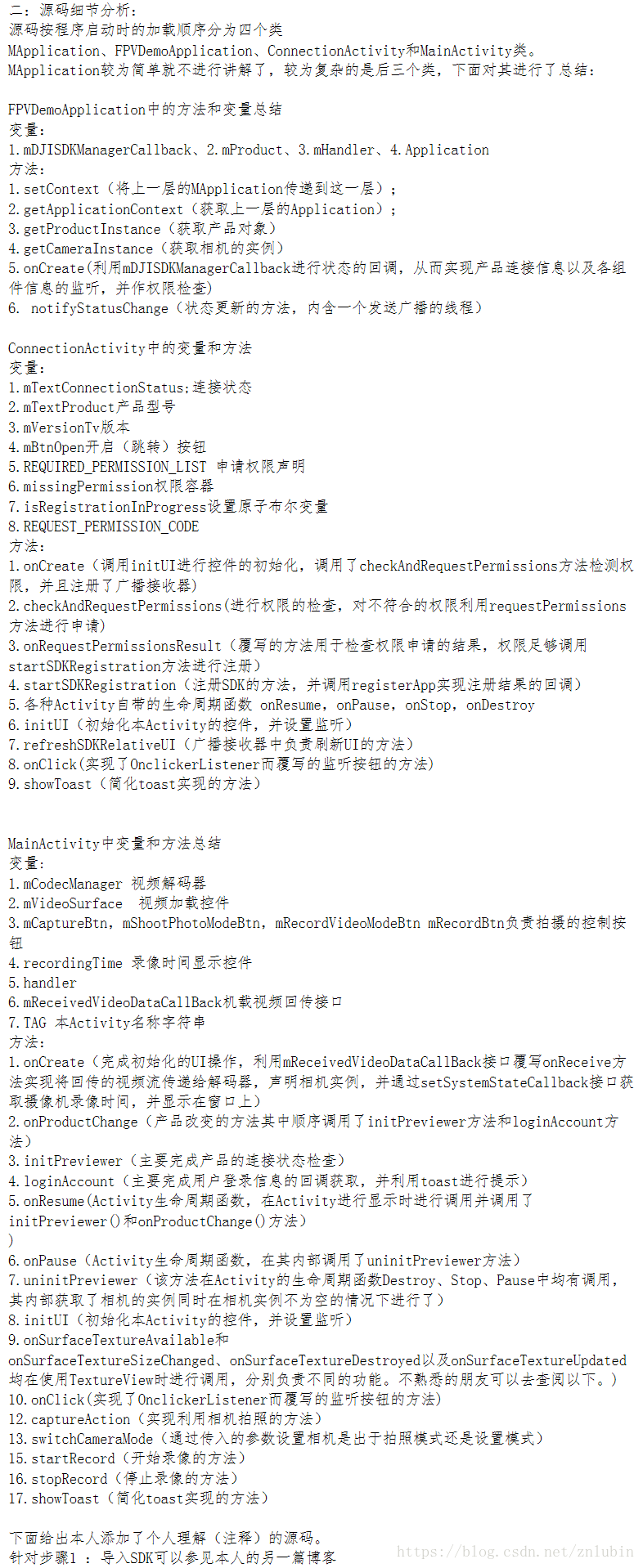
DJI SDK開發之相機應用源碼詳細解析
DJI Mobile SDK開發之相機應用篇–源碼詳細解析 詳細分析 實現后界面如圖: DJI源碼下載地址:https://github.com/DJI-Mobile-SDK-Tutorials/Android-FPVDemo...


freemarker + ItextRender 根據模板生成PDF文件
1. 制作模板 2. 獲取模板,并將所獲取的數據加載生成html文件 2. 生成PDF文件 其中由兩個地方需要注意,都是關于獲取文件路徑的問題,由于項目部署的時候是打包成jar包形式,所以在開發過程中時直接安照傳統的獲取方法沒有一點文件,但是當打包后部署,總是出錯。于是參考網上文章,先將文件讀出來到項目的臨時目錄下,然后再按正常方式加載該臨時文件; 還有一個問題至今沒有解決,就是關于生成PDF文件...
電腦空間不夠了?教你一個小秒招快速清理 Docker 占用的磁盤空間!
Docker 很占用空間,每當我們運行容器、拉取鏡像、部署應用、構建自己的鏡像時,我們的磁盤空間會被大量占用。 如果你也被這個問題所困擾,咱們就一起看一下 Docker 是如何使用磁盤空間的,以及如何回收。 docker 占用的空間可以通過下面的命令查看: TYPE 列出了docker 使用磁盤的 4 種類型: Images:所有鏡像占用的空間,包括拉取下來的鏡像,和本地構建的。 Con...
猜你喜歡

requests實現全自動PPT模板
http://www.1ppt.com/moban/ 可以免費的下載PPT模板,當然如果要人工一個個下,還是挺麻煩的,我們可以利用requests輕松下載 訪問這個主頁,我們可以看到下面的樣式 點每一個PPT模板的圖片,我們可以進入到詳細的信息頁面,翻到下面,我們可以看到對應的下載地址 點擊這個下載的按鈕,我們便可以下載對應的PPT壓縮包 那我們就開始做吧 首先,查看網頁的源代碼,我們可以看到每一...
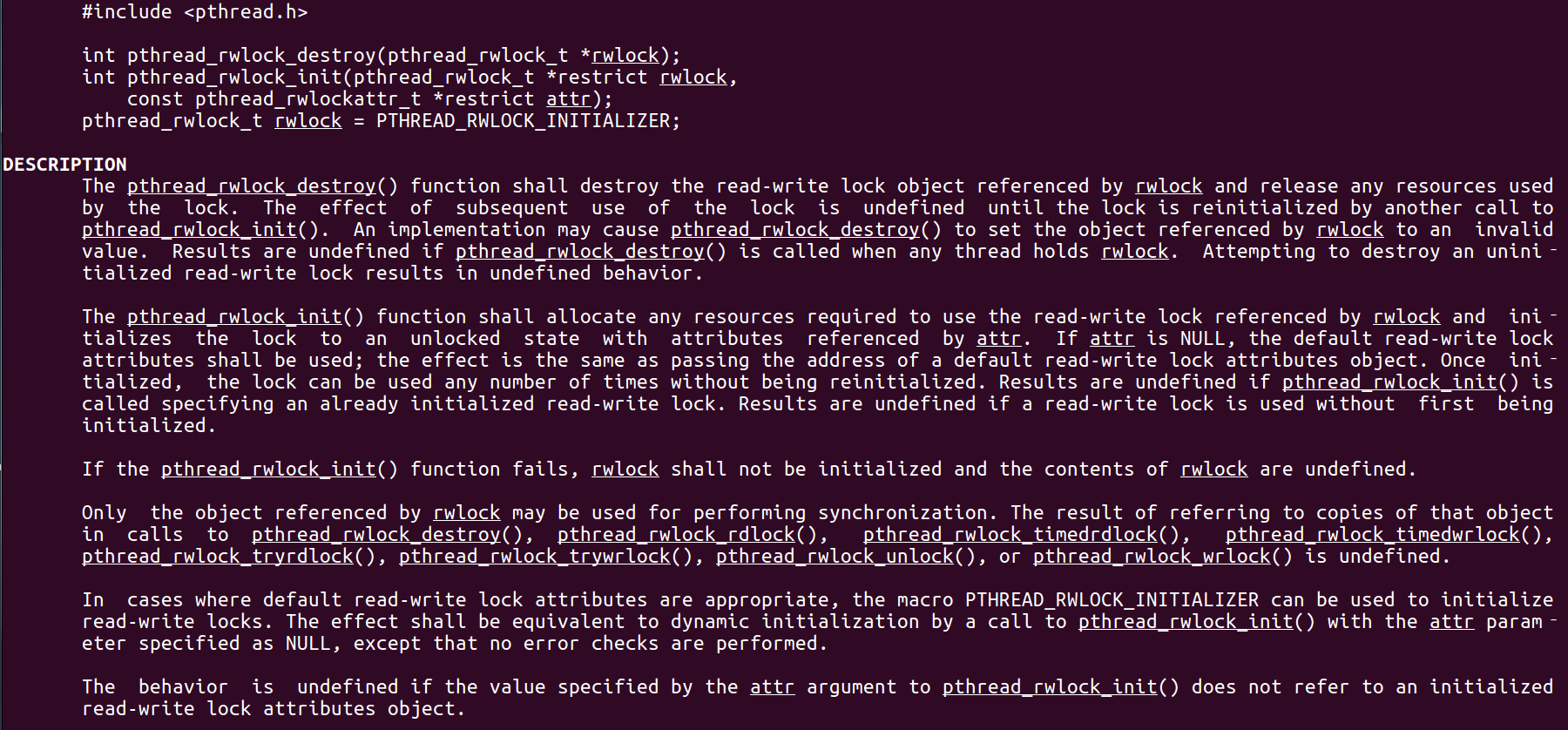
Linux C系統編程-線程互斥鎖(四)
互斥鎖 互斥鎖也是屬于線程之間處理同步互斥方式,有上鎖/解鎖兩種狀態。 互斥鎖函數接口 1)初始化互斥鎖 pthread_mutex_init() man 3 pthread_mutex_init (找不到的情況下首先 sudo apt-get install glibc-doc sudo apt-get install manpages-posix-dev) 動態初始化 int pthread_...
統計學習方法 - 樸素貝葉斯
引入問題:一機器在良好狀態生產合格產品幾率是 90%,在故障狀態生產合格產品幾率是 30%,機器良好的概率是 75%。若一日第一件產品是合格品,那么此日機器良好的概率是多少。 貝葉斯模型 生成模型與判別模型 判別模型,即要判斷這個東西到底是哪一類,也就是要求y,那就用給定的x去預測。 生成模型,是要生成一個模型,那就是誰根據什么生成了模型,誰就是類別y,根據的內容就是x 以上述例子,判斷一個生產出...

styled-components —— React 中的 CSS 最佳實踐
https://zhuanlan.zhihu.com/p/29344146 Styled-components 是目前 React 樣式方案中最受關注的一種,它既具備了 css-in-js 的模塊化與參數化優點,又完全使用CSS的書寫習慣,不會引起額外的學習成本。本文是 styled-components 作者之一 Max Stoiber 所寫,首先總結了前端組件化樣式中的最佳實踐原則,然后在此基...