DJI Mobile SDK(2):多自由度控制飛行(Virtual Stick)
??由于項目開發需要用電腦控制Mavic進行飛行。最終選擇的方案是用手機做一個中轉,即“電腦->手機app->遙控器->飛行器”,電腦和手機之間采用TCPSocket通信。
??循序漸進,本文主要介紹如何編寫手機app來控制Mavic飛行。
編寫UI
??UI上一共放置了18個Button,用來模擬遙控器,主要包括左右兩套搖桿、起飛、降落、使能手機控制、關閉手機控制,以及四個備用Button。具體代碼就不寫了,最終實現的界面如下。

按鈕響應
??最主要的一個Button就是EN(使能手機控制),點擊之后,進行一系列初始化的工作。在onClick()方法里編寫。
public void onClick(View v){
switch (v.getId()) {
case R.id.button_enable_virtual_stick:{
//使能控制
DJISampleApplication.getAircraftInstance().
getFlightController().
setVirtualStickModeEnabled(true, new CommonCallbacks.CompletionCallback() {
@Override
public void onResult(DJIError djiError) {
}
});
//設置飛行器坐標系和控制模式
DJISampleApplication.getAircraftInstance().getFlightController().
setRollPitchCoordinateSystem(FlightCoordinateSystem.BODY);
DJISampleApplication.getAircraftInstance().getFlightController().
setVerticalControlMode(VerticalControlMode.POSITION);
DJISampleApplication.getAircraftInstance().getFlightController().
setYawControlMode(YawControlMode.ANGULAR_VELOCITY);
DJISampleApplication.getAircraftInstance().getFlightController().
setRollPitchControlMode(RollPitchControlMode.VELOCITY);
//定時器用來定時,200ms發送一次數據
if (null == sendVirtualStickDataTimer) {
sendVirtualStickDataTask = new SendVirtualStickDataTask();
sendVirtualStickDataTimer = new Timer();
sendVirtualStickDataTimer.schedule(sendVirtualStickDataTask, 100, 200);
}
break;
}
}
}??首先是使能手機控制,其次設置飛行器的坐標系(body || ground)和飛行控制模式(速度控制 || 位置控制)。這個很重要,因為它決定著你點擊按鈕后發給飛機的到底是速度值還是位置值(我這里依次設置的是:坐標系–BODY,垂直–POSITION,Yaw軸–ANGULAR_VELOCITY,PitchRoll軸–VELOCITY),詳情參考DJI developer。最后是一個定時器配置,每隔200ms給無人機發送一次數據。
??之后在onClick()方法里添加其他Button的響應,代碼如下:
case R.id.button_take_off:{
DJISampleApplication.getAircraftInstance().getFlightController()
.startTakeoff(new CommonCallbacks.CompletionCallback() {
@Override
public void onResult(DJIError djiError) {
}
});
break;
}
case R.id.button_auto_land:{
DJISampleApplication.getAircraftInstance().getFlightController().
startLanding(new CommonCallbacks.CompletionCallback() {
@Override
public void onResult(DJIError djiError) {
}
});
break;
}
case R.id.button_left_up:{
yaw = 0;
pitch = 0;
roll = 0;
if (throttle < 50) {
throttle = throttle + 1;
}
break;
}
case R.id.button_left_left:{
yaw = -10f;
pitch = 0;
roll = 0;
throttle = 3f;
break;
}
case R.id.button_left_center:{
yaw = 0;
pitch = 0;
roll = 0;
break;
}
case R.id.button_left_right:{
yaw = 10f;
pitch = 0;
roll = 0;
throttle = 3f;
break;
}
case R.id.button_left_down:{
yaw = 0;
pitch = 0;
roll = 0;
if (throttle > 3){
throttle = throttle - 1;
}
break;
}
case R.id.button_right_up:{
yaw = 0;
pitch = 0;
roll = 1;
throttle = 3f;
break;
}
case R.id.button_right_left:{
yaw = 0;
pitch = -2;
roll = 0;
throttle = 3f;
break;
}
case R.id.button_right_center:{
yaw = 0;
pitch = 0;
roll = 0;
break;
}
case R.id.button_right_right:{
yaw = 0;
pitch = 2;
roll = 0;
throttle = 3f;
break;
}
case R.id.button_right_down:{
yaw = 0;
pitch = 0;
roll = -1;
throttle = 3f;
break;
}
case R.id.button_disable_virtual_stick:{
DJISampleApplication.getAircraftInstance().
getFlightController().
setVirtualStickModeEnabled(false, new CommonCallbacks.CompletionCallback() {
@Override
public void onResult(DJIError djiError) {
}
});
break;
}
default:
break;
}??以上主要是其它Button的響應,根據我們設置的控制模式,yaw pitch roll分別代表三個軸的速度(或角速度),throttle 代表垂直的高度。這里還有自動起飛、自動降落、關閉手機控制的Button,不再贅述。
??之后就是我們的定時器的定時發送任務,把手機設置的控制指令每隔200ms發送給無人機。
private class SendVirtualStickDataTask extends TimerTask {
@Override
public void run() {
if (isFlightControllerAvailable()) {
DJISampleApplication.getAircraftInstance()
.getFlightController()
.sendVirtualStickFlightControlData(new FlightControlData(pitch,
roll,
yaw,
throttle),
new CommonCallbacks.CompletionCallback() {
@Override
public void onResult(DJIError djiError) {
}
});
}
}
}模擬飛行
??代碼寫完了,不能每次調試都拿著飛機出去飛,況且代碼不知道能不能用,萬一出點Bug,亂發一些控制信號,可能就炸機了(說到這里,摸了摸我的Mavic云臺T_T)。
??不過DJI還是很人性化的,有一個調參軟件DJI Assistant可以模擬飛行。裝飛機驅動之后,把飛機通過USB連接到PC上,打開DJI Assistant找到“模擬器”。就可以愉快地調試啦!
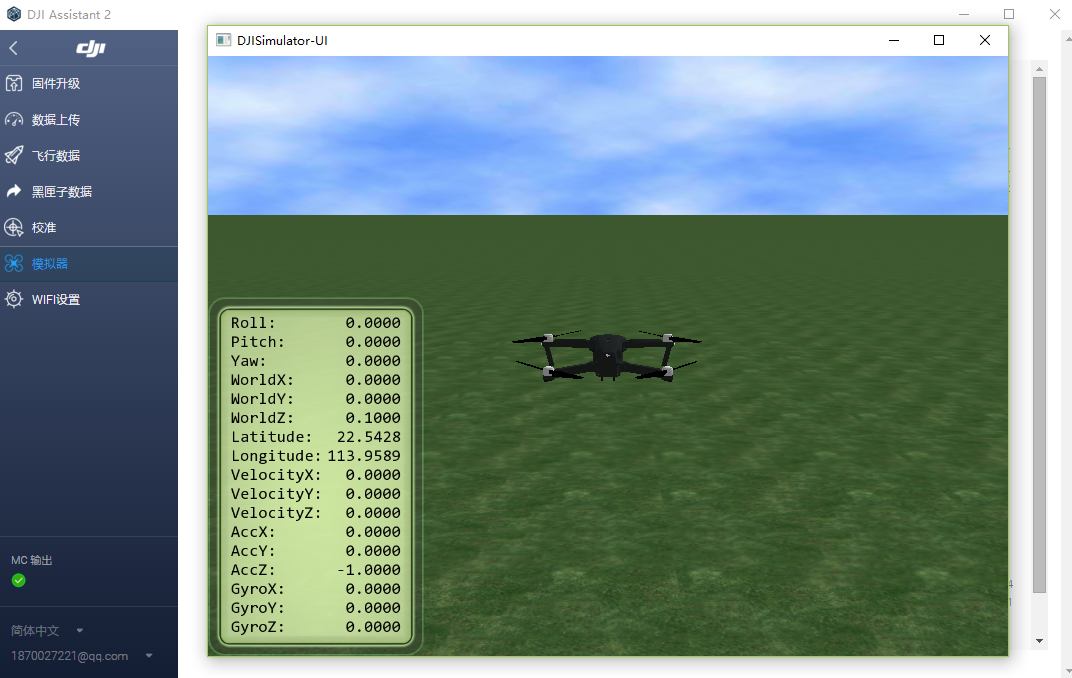
??特別提示,模擬器必須要連接無人機,防止出現危險,請把無人機的槳葉全部拆掉!!!
??加油!
智能推薦
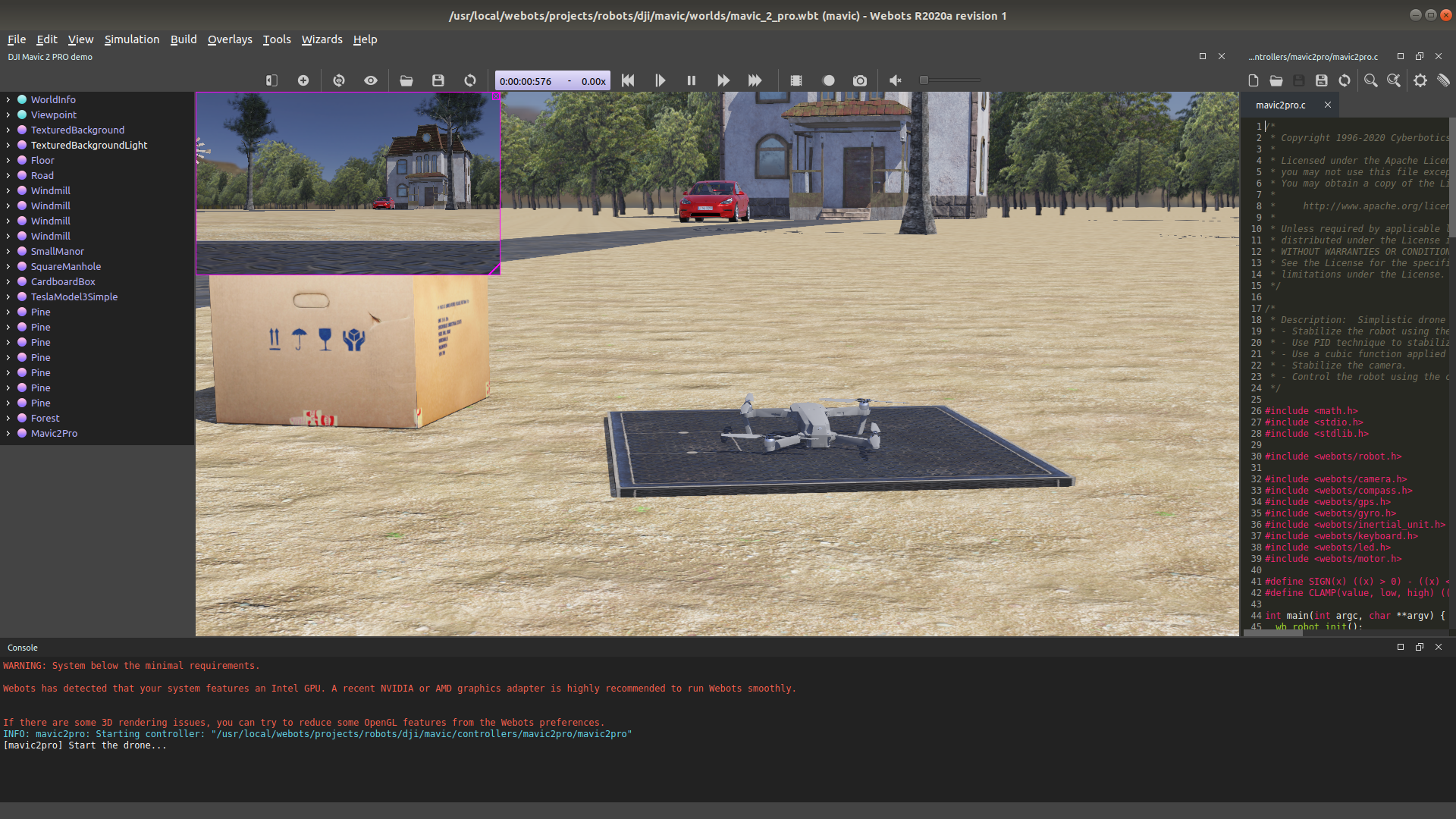
大疆“御”2 DJI Mavic 2 Pro無人機仿真環境搭建
假期無聊宅在家部署一個大疆無人機仿真環境,零成本愉快玩耍! Ubuntu ROS Webots 18.04.1 Melodic 2020a-rev1...

Dji OSDK初步設置
1.軟件的配置 *下載SDK和相關工具:* A.下載Onboard SDK——具體網址:https://github.com/dji-sdk/Onboard-SDK.git 在想要安裝的文件夾下執行git clone https://github.com/dji-sdk/Onboard-SDK.git。 在windows上安裝DJI PC Assitant 2. 在遙控器上...
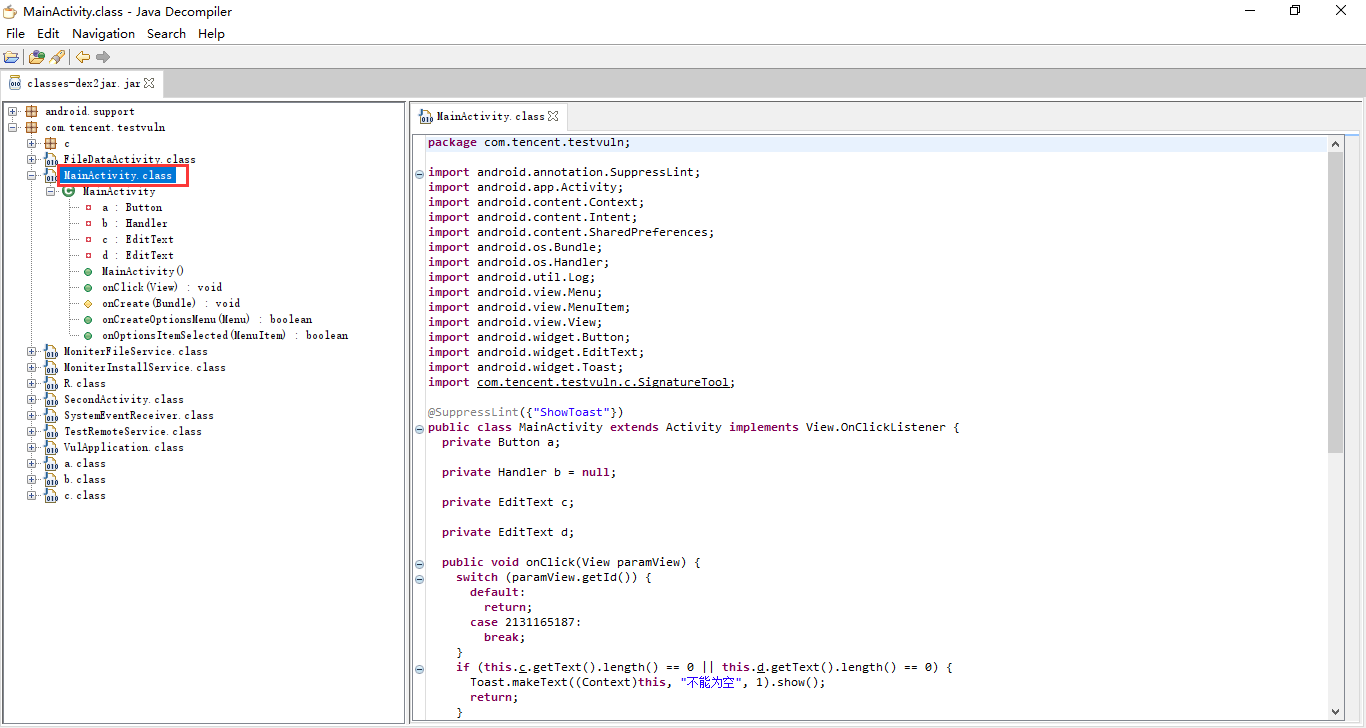
XCTF-mobile app2
app2-安卓逆向 1.提取文件 2.分析文件 3.分析XML文件 4.經過驗證得到flag 5.其他解法 下載地址:點此下載 1.提取文件 更改app安裝包后綴為zip 把這3個文件解壓出來 然后使用dex2jar將dex文件轉換為jar文件,得到一個jar文件,這個文件中包含了大部分程序邏輯 再使用AXMLPrinter2.jar對AndroidManifest.xml進行解包 2.分析文件 ...


freemarker + ItextRender 根據模板生成PDF文件
1. 制作模板 2. 獲取模板,并將所獲取的數據加載生成html文件 2. 生成PDF文件 其中由兩個地方需要注意,都是關于獲取文件路徑的問題,由于項目部署的時候是打包成jar包形式,所以在開發過程中時直接安照傳統的獲取方法沒有一點文件,但是當打包后部署,總是出錯。于是參考網上文章,先將文件讀出來到項目的臨時目錄下,然后再按正常方式加載該臨時文件; 還有一個問題至今沒有解決,就是關于生成PDF文件...
猜你喜歡
電腦空間不夠了?教你一個小秒招快速清理 Docker 占用的磁盤空間!
Docker 很占用空間,每當我們運行容器、拉取鏡像、部署應用、構建自己的鏡像時,我們的磁盤空間會被大量占用。 如果你也被這個問題所困擾,咱們就一起看一下 Docker 是如何使用磁盤空間的,以及如何回收。 docker 占用的空間可以通過下面的命令查看: TYPE 列出了docker 使用磁盤的 4 種類型: Images:所有鏡像占用的空間,包括拉取下來的鏡像,和本地構建的。 Con...

requests實現全自動PPT模板
http://www.1ppt.com/moban/ 可以免費的下載PPT模板,當然如果要人工一個個下,還是挺麻煩的,我們可以利用requests輕松下載 訪問這個主頁,我們可以看到下面的樣式 點每一個PPT模板的圖片,我們可以進入到詳細的信息頁面,翻到下面,我們可以看到對應的下載地址 點擊這個下載的按鈕,我們便可以下載對應的PPT壓縮包 那我們就開始做吧 首先,查看網頁的源代碼,我們可以看到每一...
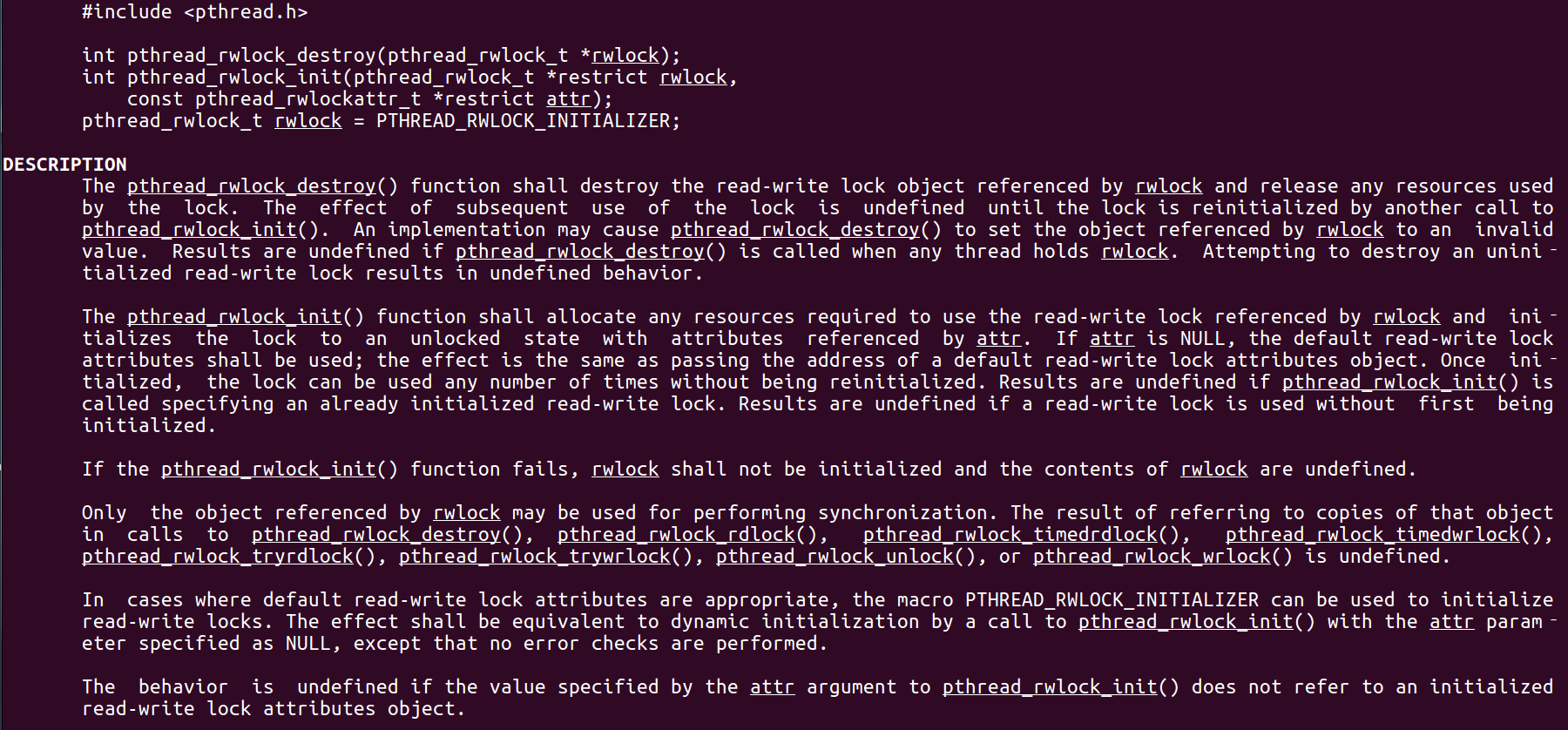
Linux C系統編程-線程互斥鎖(四)
互斥鎖 互斥鎖也是屬于線程之間處理同步互斥方式,有上鎖/解鎖兩種狀態。 互斥鎖函數接口 1)初始化互斥鎖 pthread_mutex_init() man 3 pthread_mutex_init (找不到的情況下首先 sudo apt-get install glibc-doc sudo apt-get install manpages-posix-dev) 動態初始化 int pthread_...
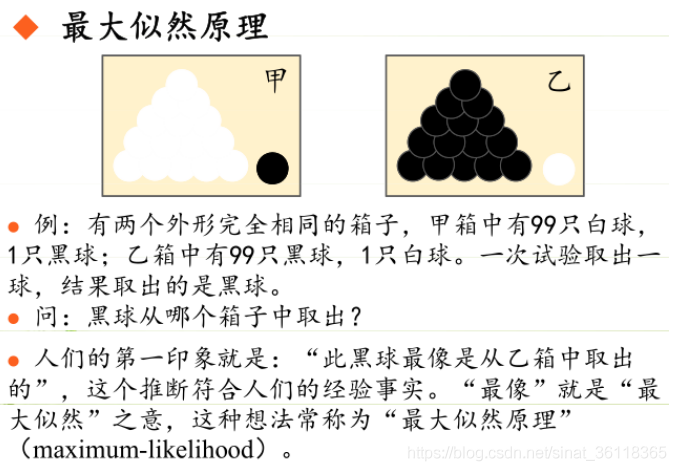
統計學習方法 - 樸素貝葉斯
引入問題:一機器在良好狀態生產合格產品幾率是 90%,在故障狀態生產合格產品幾率是 30%,機器良好的概率是 75%。若一日第一件產品是合格品,那么此日機器良好的概率是多少。 貝葉斯模型 生成模型與判別模型 判別模型,即要判斷這個東西到底是哪一類,也就是要求y,那就用給定的x去預測。 生成模型,是要生成一個模型,那就是誰根據什么生成了模型,誰就是類別y,根據的內容就是x 以上述例子,判斷一個生產出...