顏色協調模型Color Harmoniztion
前言
最近做換臉,在膚色調整的那一塊,看到一個有意思的文章,復現一波玩玩。不過最后一步掉鏈子了,有興趣的可以一起討論把鏈子補上。
主要是github上大佬的那個復現代碼和原文有點差異,而且代碼復雜度過高,閱讀費勁,這里為了清晰理解理論知識,就一步一步按照論文的每個章節走,不過有很大一部分代碼都借鑒大佬了。
國際慣例,參考文獻:
簡介
這篇論文主要干啥呢,看下圖

注意小姑涼的衣服的顏色從左邊的原圖變成了右邊的變化了的圖片。
那么論文的工作就是:在盡量保持原色的基礎上,調整圖片顏色,使得圖片整體顏色看起來更加協調。
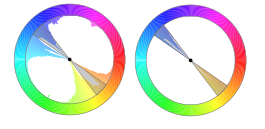
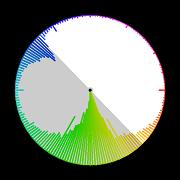
基本原理就是將RGB圖像轉成HSV,然后調整色相(hue)直方圖。下圖中左邊的彩色圓環代表原始圖片的色相直方圖,右邊為論文調整后的色相直方圖。
感覺這個論文用來去除雜色應該挺有用,不過更好玩的是能交互式自動調色。
【注】要知道色度hue的范圍是 ,opencv里面提取出來的是
流程復現
環境python3、opencv-python==3.4.2.16、opencv-contrib-python==3.4.2.16
注意如果找不到ximgproc,手動卸載opencv-contrib-python再重新安裝,自動卸載安裝無法解決問題。
顏色模板
首先,文章介紹了8種比較適合用于調色的模板,注意灰色區域的大小固定,但是位置不是固定的,可以繞著圓心旋轉。
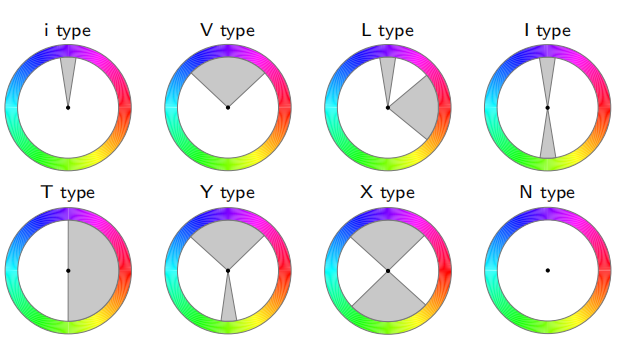
當圖像的色相都落在灰色區域,就是顏色處理的比較好的圖像。
文末介紹了每個模板的灰色區域面積比:
-
模板中大的扇形區域:
V,Y,X占26%的面積,角度是 -
模板中小的扇形區域:
i,L,I,Y占5%的面積,角度是 -
模板
L占22%面積,角度是 -
模板
T占50%面積,角度是 -
模板
I,X,Y的兩個扇形區的夾角是 -
模板
L兩個扇形區的夾角是
不過大佬已經把這部分列出來了,兩個數,第一個是扇形區域的中心,第二個是扇形區域的寬度:
#定義模板,分別定義的中心與邊界偏轉角度
HueTemplates = {
"i" : [( 0.00, 0.05)],
"V" : [( 0.00, 0.26)],
"L" : [( 0.00, 0.05), ( 0.25, 0.22)],
"mirror_L": [( 0.00, 0.05), (-0.25, 0.22)],
"I" : [( 0.00, 0.05), ( 0.50, 0.05)],
"T" : [( 0.25, 0.50)],
"Y" : [( 0.00, 0.26), ( 0.50, 0.05)],
"X" : [( 0.00, 0.26), ( 0.50, 0.26)],
}
隨便顯示一個瞅瞅
#預覽模板
def show_temp(template_name,template_alpha):
canvas = np.zeros((canvas_h, canvas_w, 3)) #畫布
cv2.circle(canvas, (yc, xc), circle_r, (255,255,255), -1) #畫圓
for t in HueTemplates[template_name]:
center = t[0]*360 + template_alpha
width = t[1]*360
start = center - width/2
end = center + width/2
cv2.ellipse(canvas,(yc,xc),(circle_r,circle_r),0,start,end,(0,0,0),-1,cv2.LINE_AA)
cv2.circle(canvas, (yc, xc), 10, (0,0,0), -1,cv2.LINE_AA) #畫中心點
canvas = np.array(canvas,np.uint8)
canvas = cv2.cvtColor(canvas,cv2.COLOR_BGR2RGB)
return canvas
plt.imsave('./temp/show_temp.png',show_temp('X',90),cmap='gray')
色相直方圖
就是單純的將圖像的H通道提取出來,看看像素個數。
def count_hue_histogram(X):
N = 360
H = X[:, :, 0].astype(np.int32) * 2
H_flat = H.flatten()
histo = np.zeros(N)
for i in range(N):
histo[i] = np.sum(H_flat==i);
return histo
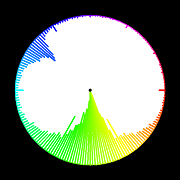
然后把它畫到一個環上
canvas_h = 600 #畫布高度
canvas_w = 600 #畫布寬度
yc = int(canvas_h/2) #圓心位置y
xc = int(canvas_w/2) #圓心位置x
circle_r = 250 #半徑
def draw_polar_histogram(histo):
N = 360
histo = histo.astype(float)
histo /= np.max(histo)
histo *= circle_r
canvas = np.zeros((canvas_h, canvas_w, 3)) #畫布
cv2.circle(canvas, (yc, xc), circle_r, (255,255,255), -1) #畫圓
for i in range(N):
theta = -i * np.pi / 180 #各個hue的弧度
count = histo[i] #各個hue的數目
#當前hue的柱子
y1 = yc - int(circle_r * np.sin(theta))
x1 = xc + int(circle_r * np.cos(theta))
y2 = yc - int((circle_r-histo[i]) * np.sin(theta))
x2 = xc + int((circle_r-histo[i]) * np.cos(theta))
color_HSV = np.zeros((1,1,3), dtype=np.uint8)
color_HSV[0,0,:] = [int(i/2),255,255] #每個角度的H
color_BGR = cv2.cvtColor(color_HSV, cv2.COLOR_HSV2BGR) #將HSV轉換為BGR
B = int(color_BGR[0,0,0])
G = int(color_BGR[0,0,1])
R = int(color_BGR[0,0,2])
cv2.line(canvas, (x1,y1), (x2,y2), (B,G,R), 3,cv2.LINE_AA) #畫柱子
canvas = cv2.circle(canvas, (yc, xc), 5, (0,0,0), -1) #圓心
canvas = np.array(canvas,np.uint8)
canvas = cv2.cvtColor(canvas,cv2.COLOR_BGR2RGB)
return canvas
測試代碼
img_rgb = cv2.imread('peacock.png')
img_hsv = cv2.cvtColor(img_rgb,cv2.COLOR_BGR2HSV)
h_hist = count_hue_histogram(img_hsv)
img_hue = img_hsv[...,0].copy()*2.0
img_sat = img_hsv[...,1].copy()/2.55
hist_img = draw_polar_histogram(h_hist)
plt.imsave('./temp/hist_img.png',hist_img)
圖像評分
正式進入論文第3章節,根據圖像的色相與每個模板扇形區域的邊界的最小距離,以及每個像素的飽和度,來計算得分,公式為
X代表圖像,p代表圖像每個像素位置的色度值(Hue),代表色度值p與扇形區域最接近的邊界,代表HSV中的飽和度S
接下來先看某個模板中,每個色相與邊界的最短距離(角度值差),如果色相在模板的扇形區域內,距離為:
#圓弧距:在hue圓上的角度差
def deg_distance(a, b):
d1 = np.abs(a - b)
d2 = np.abs(360-d1)
d = np.minimum(d1, d2)
return d
#是否在區域內
def in_border(h,center,width):
return deg_distance(h,center)<width/2
#區域外的h,計算最近邊界的圓弧距
def dist_to_border(h,border):
H1=deg_distance(h,border[0])
H2=deg_distance(h,border[1])
H_dist2bdr = np.minimum(H1,H2)
return H_dist2bdr
#計算當前模板的每個hue值的加權
def hue_weight(temp_name,alpha):
hweight = []
h = np.arange(360)
for t in HueTemplates[temp_name]:
center = t[0]*360 + alpha #中心位置
width = t[1]*360 #寬度
border = [center - width/2,center + width/2] #起止位置
temp_dist = dist_to_border(h,border) #色相與當前邊界的距離
temp_dist[in_border(h,center,width)]=0
hweight.append(temp_dist)
hweight = np.array(hweight)
hweight = hweight.min(axis=0)
return hweight
接下來計算第一項:
直接將圖像H值換成對應的最近邊界距離即可:
# 利用template的hue權重對圖像的hue直方圖進行加權
def h_dist(img_h,temp_name,alpha):
score = np.zeros((img_h.shape[0],img_h.shape[1]),dtype=np.float32)
hw = hue_weight(temp_name,alpha)
for i in range(360):
score[img_h==i]= hw[i]
return score
再跟飽和度一起,把圖像與每個模板對應的得分都計算出來
#計算最小的模板得分
def cal_scores(img_hue,img_s):
scores = np.zeros((len(HueTemplates.keys()),360),dtype=np.float32)
temp_keys = list(HueTemplates.keys())
for i in range(len(temp_keys)):#遍歷模板
print('temp_keys',temp_keys[i])
for alpha in range(360):#每個旋轉角度
scores[i,alpha]=np.sum(np.multiply(h_dist(img_hue,temp_keys[i],alpha),img_s))
return scores
提取最好的那個模板和角度,使得當前的圖像得分最大
# 計算每個模板的得分
hue_scores = cal_scores(img_hue,img_sat)
#得到最好的template和alpha
[best_m,betst_alpha] = np.unravel_index(np.argmin(hue_scores),hue_scores.shape)
'''
temp_keys i
temp_keys V
temp_keys L
temp_keys mirror_L
temp_keys I
temp_keys T
temp_keys Y
temp_keys X
'''
把最好的模板、旋轉角度與對應圖像色相直方圖放一起顯示一波瞅瞅
#畫圖
hist_img = draw_polar_histogram(h_hist)
temp_keys = list(HueTemplates.keys())
print(temp_keys[best_m],betst_alpha)
temp_img = show_temp(temp_keys[best_m],betst_alpha)
overlay_img = cv2.addWeighted(temp_img,0.2,hist_img,1-0.2,0)
plt.figure(figsize=(8,8))
plt.imshow(overlay_img)
plt.imsave('./temp/overlay_img.png',overlay_img)
'''
T 46
'''
圖像分割
上面有些模板有兩個對稱扇形,這兩個扇形代表互補色,也就是顏色差距很大,但是當我們把扇形外面的像素壓到扇形里面去的時候,中間的一些顏色到兩個扇形的距離差不多,這時候就會出現相似的顏色被壓到了完全不同的顏色。如下圖所示
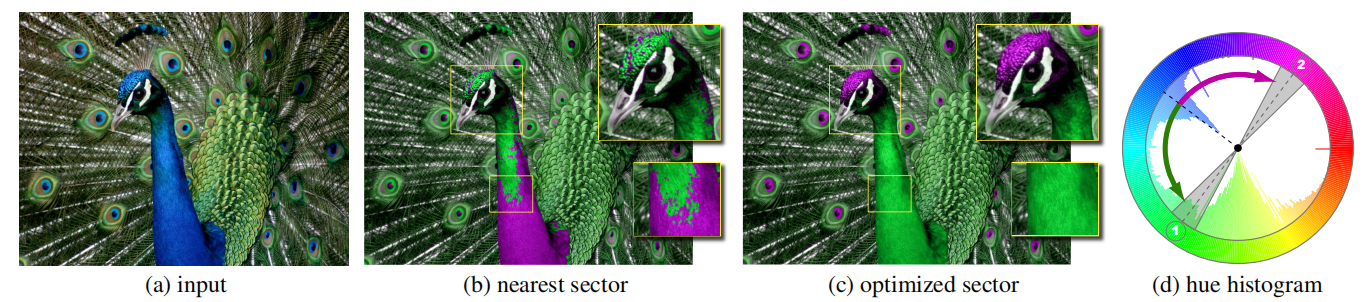
看(d)圖,兩個箭頭從同一個位置出發,但是這個位置的色相到兩個扇形的距離差不多,這時候如果隨機分配顏色,就會出現孔雀脖子上相似的顏色被壓到完全不同的兩個顏色里面去了。
這時候,我們就需要對每個像素指定他所壓縮的扇形,并且要保證圖像比較連續的區域的顏色不要被壓的不連續了,那么就可以先對圖像每個像素進行二分類,當有兩個扇形的時候,像素標簽為 ,分別表示應該被劃分到哪個區域。
文章的算法貌似比較耗時,大佬使用了opencv里面的一個超像素塊劃分方法,參考文檔看前言。這個超像素塊劃分有點類似于目標分割,達到的效果如下:
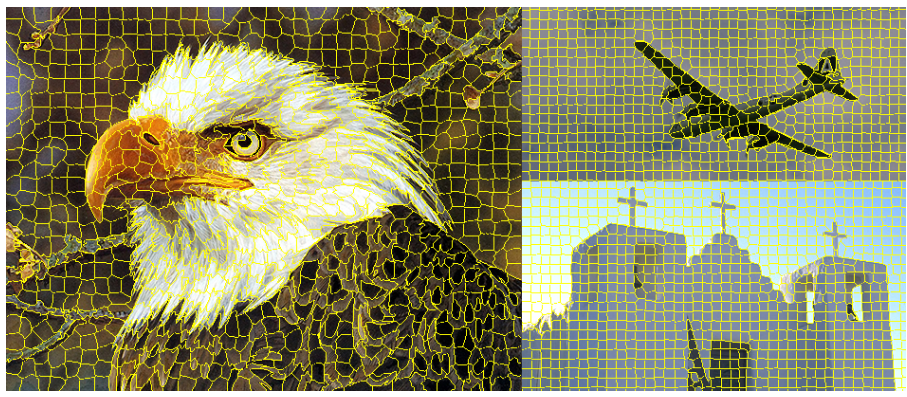
原圖戳這里
可以看出來,連續區域基本被劃分到一塊了。每一塊都被標記為一個單獨的類別。
我們現在要把這一對類別合并起來,變成兩個類別。
分割流程大致可以分為這樣
先不看顏色的連續性,單純計算每個像素的色相到哪個扇形區域最近,先為每個像素單獨打標簽
#先計算每個像素到哪個扇形區域距離最短
def class_pix(h,temp_name,alpha):
# 先計算當前模板下,每個hue對應哪個扇區
img_label=np.zeros((h.shape[0],h.shape[1]),dtype=np.int32)
hlabels = []
hue_stand=np.arange(360)
#扇區里外一起處理,某個扇區內的距離自己的扇區邊界更近
for t in HueTemplates[temp_name]:
center = t[0]*360 + alpha #中心位置
width = t[1]*360 #寬度
border = [center - width/2,center + width/2] #起止位置
temp_dist = dist_to_border(hue_stand,border) #hue與當前扇區邊界的距離,不要排除扇區內的hue的計算
hlabels.append(temp_dist)
hlabels = np.array(hlabels)
hlabel = hlabels.argmin(axis=0)
#再把圖像的hue轉換為對應扇區標簽
for i in range(360):
img_label[h==i]=hlabel[i]
return img_label
然后再統計opencv劃分的每個超像素塊里面的像素標簽哪個多,就把當前超像素的標簽置為誰:
#制作每個像素的標簽,確定每個像素往哪個扇區shift
def split_img(img_hsv,img_h,temp_name,alpha):
num_superpixels=200
h_cls = class_pix(img_hue,temp_name,alpha)
SEEDS = cv2.ximgproc.createSuperpixelSEEDS(img_hsv.shape[1],img_hsv.shape[0],img_hsv.shape[2],num_superpixels,10)
SEEDS.iterate(img_hsv,4)
V=np.zeros((img_hue.shape))
N=V.shape[0]
grid_num = SEEDS.getNumberOfSuperpixels() #超像素塊個數
labels = SEEDS.getLabels() #原圖每個像素的屬于哪個超像素塊(標簽)
for i in range(grid_num):
P=[[],[]]
s=np.average(h_cls[labels==i]) #當前超像素塊的所有hue的標簽的均值
if(s>0.5):#像素塊大部分朝哪個扇區,就確定是哪個扇區
s=1
else:
s=0
h_cls[labels==i]=s
return h_cls
這兩個函數就保證了,顏色又連續,每個顏色被壓縮的距離又最小,色差變化不會太大。
壓色相
每個像素往哪個扇形塊壓,我們都知道了,那就執行最后一步,把像素按照下式壓到對應扇形區域去
上式中C(p)代表扇形區域的中心,代表扇形區域的寬度,代表標準高斯函數,均值為0,方差為,作者建議這個方差 等于
那么先把高斯函數寫出來唄:
#標準正態分布采樣
def normalized_gaussian(X,mu,sigma):
X=np.asarray(X).astype(np.float64)
sigma=np.asarray(sigma).astype(np.float64)
mu=X-mu
M2=np.multiply(mu,mu)
S2=np.multiply(sigma,sigma)
return (1/(sigma*np.sqrt(2*np.pi)))*np.exp(-M2/(2*S2))
最后一步,根據的公式,壓色相值
# 對每個標簽塊分別shift到對應扇區
def hue_shift(img_hsv,temp_name,alpha):
img_hue = img_hsv[...,0].copy()*2.0
new_img_hue = np.zeros_like(img_hue)
h_cls = split_img(img_hsv,img_hue,temp_name,alpha) #確定每個像素對應的扇區
i=0
for t in HueTemplates[temp_name]: #每個扇區分別處理
center = t[0]*360 + alpha
width = t[1]*360
mask = (h_cls==i) #當前扇區所對應的所有標簽
temp_hue = img_hue*mask #排除其他扇區超像素塊的干擾
center_dist = deg_distance(temp_hue,center)
G = normalized_gaussian(center_dist,0,width/2)
new_h = center + (1-G)*width/2
new_img_hue=new_img_hue+new_h*mask
i=i+1
new_img_hsv = img_hsv.copy()
new_img_hsv[...,0]=new_img_hue
result_img = cv2.cvtColor(new_img_hsv,cv2.COLOR_HSV2RGB)
return result_img
搞定!!
可視化看看結果
temp_name=temp_keys[best_m]
alpha=betst_alpha
plt.imshow(hue_shift(img_hsv,temp_name,alpha))

嗯?真心綠。
其實還有更好玩的,自己隨便指定一個template和alpha,能玩一天,比如
temp_name='X'#temp_keys[best_m]
alpha=betst_alpha
plt.imshow(hue_shift(img_hsv,temp_name,alpha))
plt.imsave('./temp/result1.png',hue_shift(img_hsv,temp_name,alpha))

艾瑪~~好玩
問題
最后一步的實現應該有問題,和大佬的代碼有點出入,可能我對論文的最后一步理解有遺漏,后面再來查缺補漏吧。有大神看論文以后,也可以在這個基礎上完善一下。
博客代碼下載:
鏈接:https://pan.baidu.com/s/1DavXVylYx3Sd0K-LygnBoQ
提取碼:ub0n
智能推薦
自定義Xshell顏色主題Color Schemes
xshell是一款強大的安全終端模擬軟件,支持SSH1, SSH2, 以及Microsoft Windows 平臺的TELNET 協議。現在推薦幾款不錯的xshell自定義顏色配色方案。 1.首先創建txt文件:scheme1.txt。編輯以下內容: 保存文件為:scheme1.xcs. 同樣的方式建立文件scheme2.xcs: 2.導入上述建立的文件 步驟:xshel tools -->...

react navigation back icon color設置導航返回按鈕顏色
自定義導航返回按鈕顏色,參考文檔找了半天沒解決,下面是我的比較笨的解決辦法,如果您有簡單的辦法麻煩評論告知一下。 版本信息 設置顏色方法 綠色部分是設置顏色的地方。 效果如下: 這樣的寫法略顯繁瑣,正在找簡單的實現辦法...

input光標使用caret-color改變顏色
本文轉載自:https://www.zhangxinxu.com/wordpress/2018/01/css-caret-color-first-line/ CSS caret-color屬性可以改變輸入框插入光標的顏色,同時又不改變輸入框里面的內容的顏色。 代碼為: caret-color屬性不僅對于原生的輸入表單控件有效,設置contenteditable的普通HTML標簽也適用。 兼容性 c...


freemarker + ItextRender 根據模板生成PDF文件
1. 制作模板 2. 獲取模板,并將所獲取的數據加載生成html文件 2. 生成PDF文件 其中由兩個地方需要注意,都是關于獲取文件路徑的問題,由于項目部署的時候是打包成jar包形式,所以在開發過程中時直接安照傳統的獲取方法沒有一點文件,但是當打包后部署,總是出錯。于是參考網上文章,先將文件讀出來到項目的臨時目錄下,然后再按正常方式加載該臨時文件; 還有一個問題至今沒有解決,就是關于生成PDF文件...
猜你喜歡
電腦空間不夠了?教你一個小秒招快速清理 Docker 占用的磁盤空間!
Docker 很占用空間,每當我們運行容器、拉取鏡像、部署應用、構建自己的鏡像時,我們的磁盤空間會被大量占用。 如果你也被這個問題所困擾,咱們就一起看一下 Docker 是如何使用磁盤空間的,以及如何回收。 docker 占用的空間可以通過下面的命令查看: TYPE 列出了docker 使用磁盤的 4 種類型: Images:所有鏡像占用的空間,包括拉取下來的鏡像,和本地構建的。 Con...

requests實現全自動PPT模板
http://www.1ppt.com/moban/ 可以免費的下載PPT模板,當然如果要人工一個個下,還是挺麻煩的,我們可以利用requests輕松下載 訪問這個主頁,我們可以看到下面的樣式 點每一個PPT模板的圖片,我們可以進入到詳細的信息頁面,翻到下面,我們可以看到對應的下載地址 點擊這個下載的按鈕,我們便可以下載對應的PPT壓縮包 那我們就開始做吧 首先,查看網頁的源代碼,我們可以看到每一...
Linux C系統編程-線程互斥鎖(四)
互斥鎖 互斥鎖也是屬于線程之間處理同步互斥方式,有上鎖/解鎖兩種狀態。 互斥鎖函數接口 1)初始化互斥鎖 pthread_mutex_init() man 3 pthread_mutex_init (找不到的情況下首先 sudo apt-get install glibc-doc sudo apt-get install manpages-posix-dev) 動態初始化 int pthread_...
統計學習方法 - 樸素貝葉斯
引入問題:一機器在良好狀態生產合格產品幾率是 90%,在故障狀態生產合格產品幾率是 30%,機器良好的概率是 75%。若一日第一件產品是合格品,那么此日機器良好的概率是多少。 貝葉斯模型 生成模型與判別模型 判別模型,即要判斷這個東西到底是哪一類,也就是要求y,那就用給定的x去預測。 生成模型,是要生成一個模型,那就是誰根據什么生成了模型,誰就是類別y,根據的內容就是x 以上述例子,判斷一個生產出...