大疆筆試題
標簽: 筆試
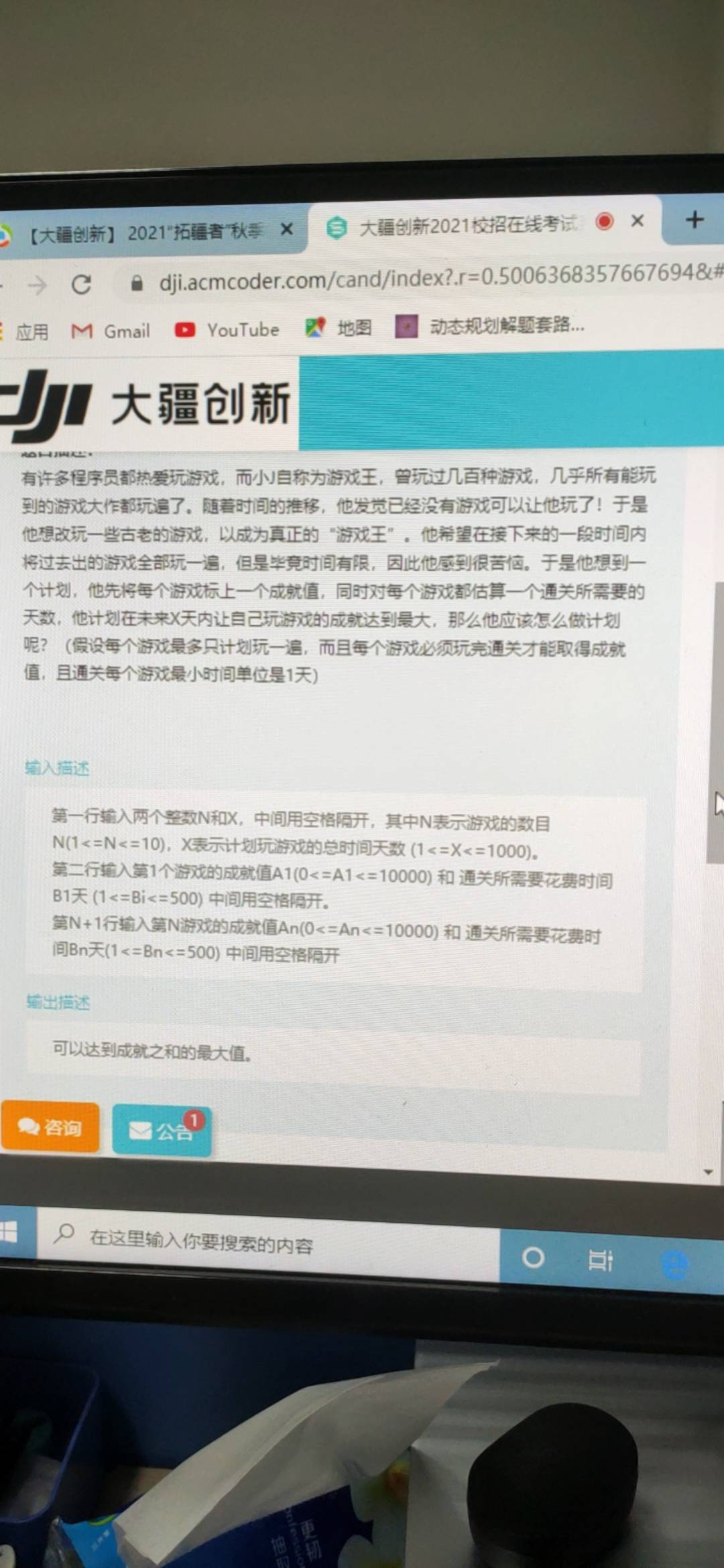
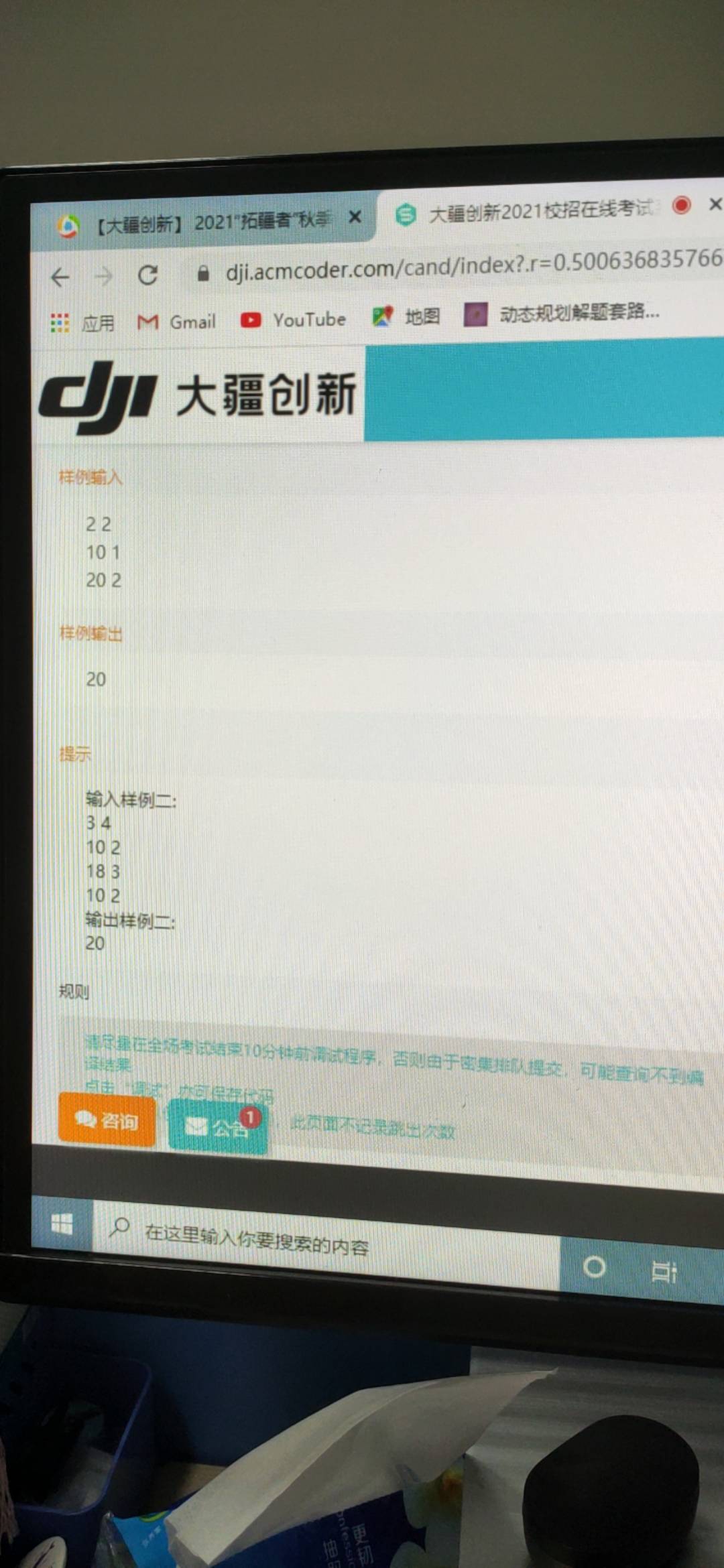
#include<iostream>
#include<vector>
using namespace std;
int main()
{
int N, X;
cin >> N >> X;
vector<int> value, day;
int day_t, value_t;
while (cin >> value_t >> day_t)
{
day.push_back(day_t);
value.push_back(value_t);
}
vector<vector<int>> dp(N + 1, vector<int>(X + 1, 0));
int res = 0;
for (int i = 1; i <= N; ++i)
{
for (int j = 1; j <= X; ++j)
{
dp[i][j] = dp[i - 1][j];
if (j >= day[i - 1])
{
dp[i][j] = max(dp[i][j], dp[i - 1][j - day[i - 1]] + value[i - 1]);
}
res = max(res, dp[i][j]);
}
}
cout << res << endl;
}
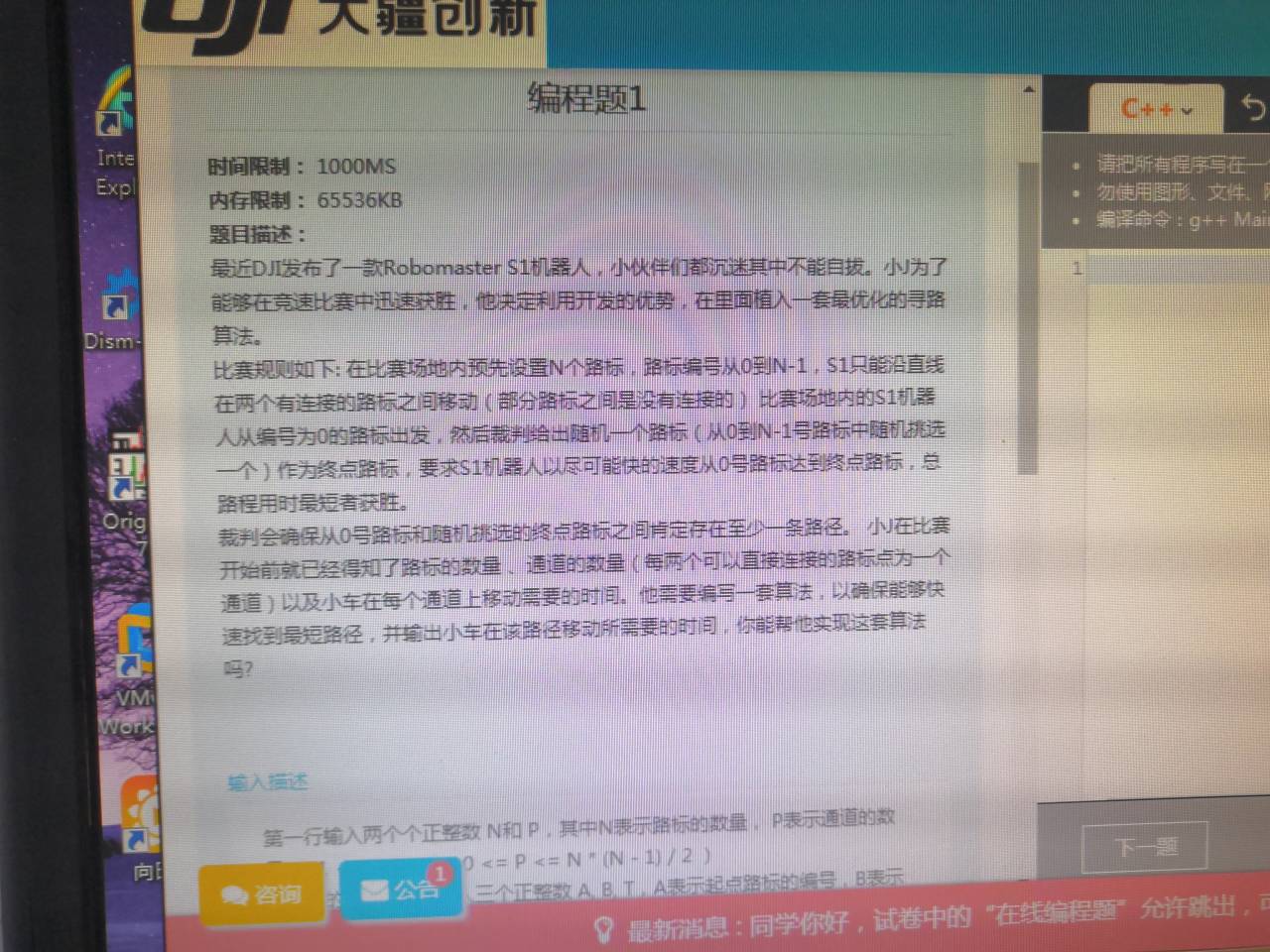
#include<iostream>
#include<vector>
#include<unordered_map>
#include<algorithm>
using namespace std;
void DFS(unordered_map<int, vector<pair<int, int>>>& mps, unordered_map<int, bool>& visit, int a, int& res, int end, int sum)
{
if (a == end)
{
res = min(res, sum);
return;
}
for (auto mp : mps[a])
{
if (visit[mp.first]) continue;
sum += mp.second;
visit[mp.first] = true;
DFS(mps, visit, mp.first, res, end, sum);
visit[mp.first] = false;
sum -= mp.second;
}
return;
}
int main()
{
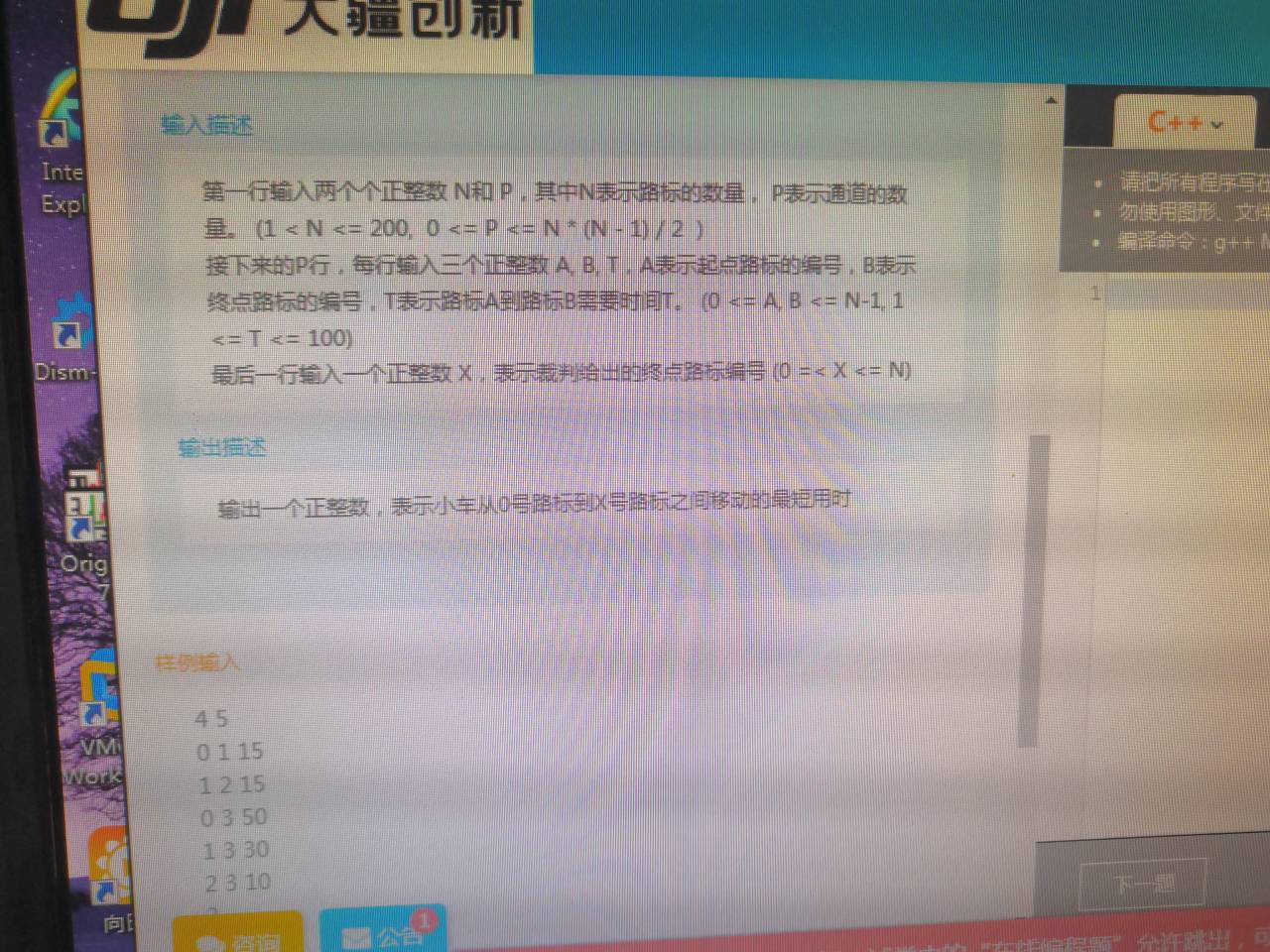
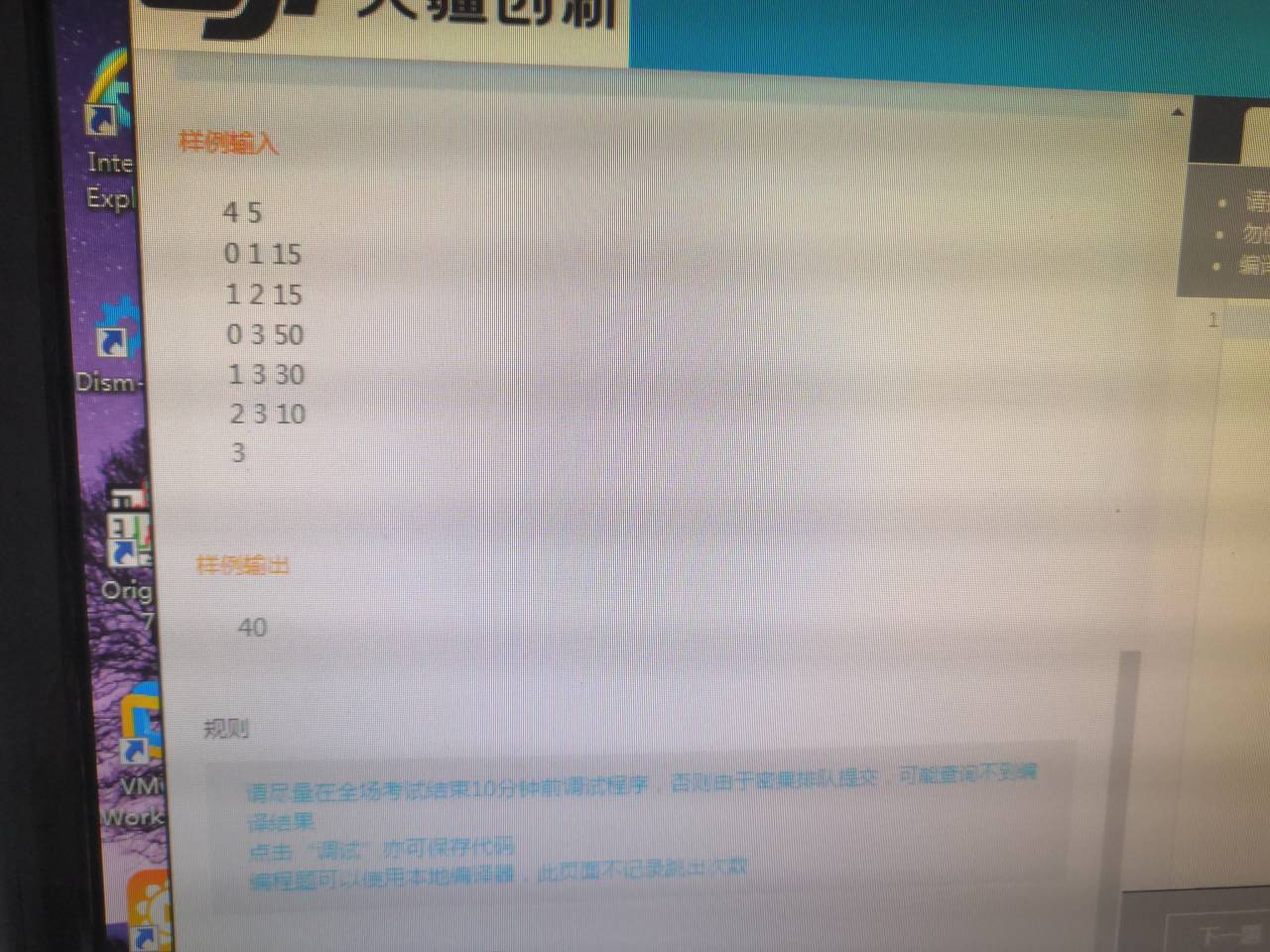
int N, P;
cin >> N >> P;
unordered_map<int, vector<pair<int, int>>> mps;
unordered_map<int, bool> visit;
for (int i = 0; i < P; ++i)
{
int A, B, T;
cin >> A >> B >> T;
mps[A].push_back(make_pair(B, T));
visit[A] = false;
visit[B] = false;
}
int end;
cin >> end;
int res = 10000;
DFS(mps, visit, 0, res, end, 0);
cout << res << endl;
return 0;
}
#include<iostream>
#include<vector>
using namespace std;
int main()
{
int N, X;
cin >> N >> X;
vector<int> value, day;
int day_t, value_t;
while (cin >> value_t >> day_t)
{
day.push_back(day_t);
value.push_back(value_t);
}
vector<vector<int>> dp(N + 1, vector<int>(X + 1, 0));
int res = 0;
for (int i = 1; i <= N; ++i)
{
for (int j = 1; j <= X; ++j)
{
dp[i][j] = dp[i - 1][j];
if (j >= day[i - 1])
{
dp[i][j] = max(dp[i][j], dp[i - 1][j - day[i - 1]] + value[i - 1]);
}
res = max(res, dp[i][j]);
}
}
cout << res << endl;
}
智能推薦
大疆地圖規劃航線飛行
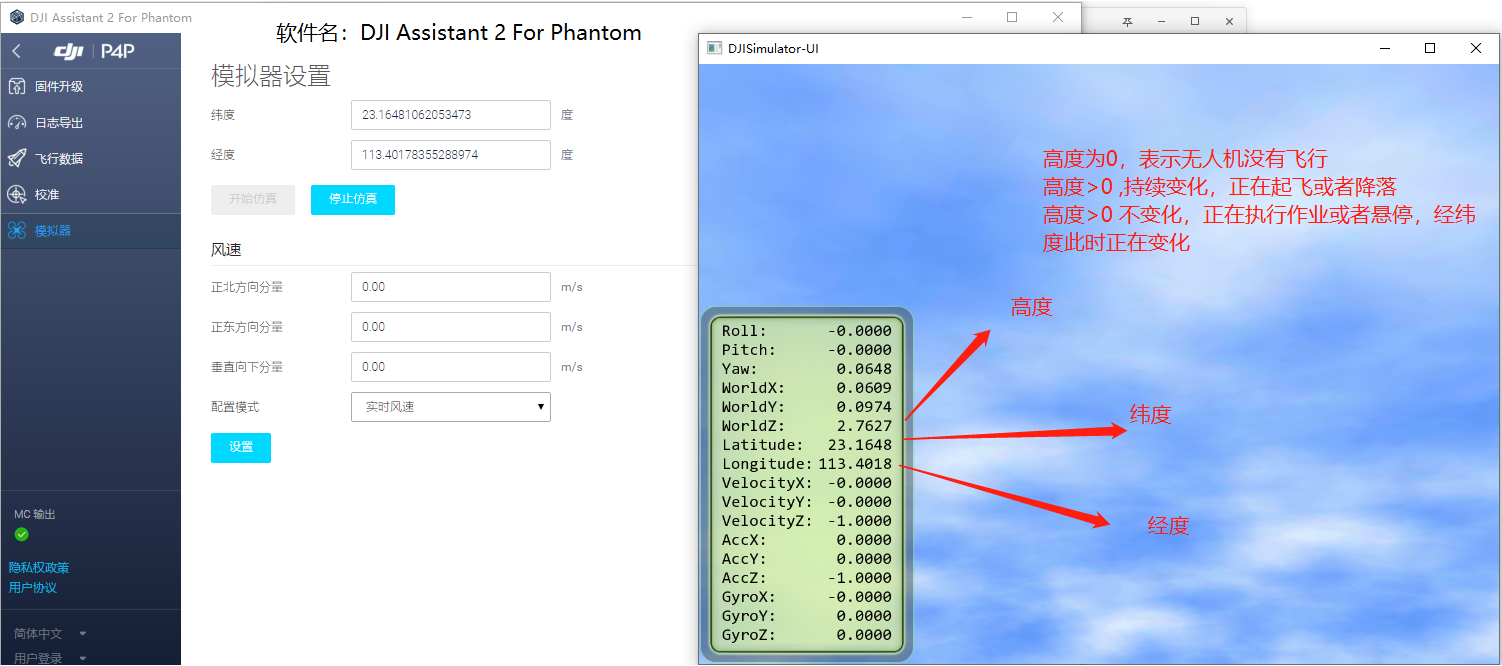
最近碰到一個需求,在app上,引用高德地圖,在地圖上選點。連線,然后上傳航點數據,讓大疆的無人機,按照我們設置的航線飛行。 1.效果圖: 1.1.下載模擬軟件,模擬無人機的當前位置,在軟件上查看軟件的飛行 DJI Assistant 2 For Phantom,運行的效果圖如下,這個軟件可以在大疆api官網下載 1.2.地圖上用紅色的小飛機,表示當前模擬的無人機的位置,點擊按鈕add,開...
大疆文檔(3)-開發流程
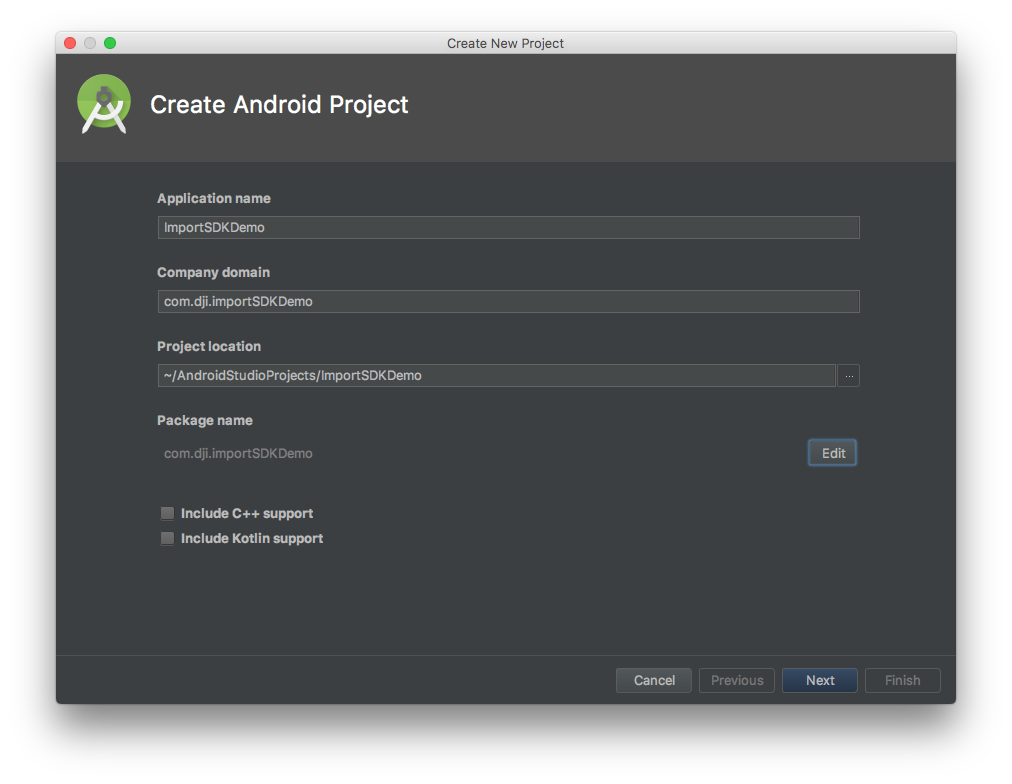
本節全篇為開發流程,內容較多,只記錄android部分 開發流程(1) 預備知識 使用DJI Mobile SDK開發應用程序需要幾個通用的和平臺特定的先決條件。 生成 了解如何去開發一個IOS或Android應用程序 一個與DJI Mobile SDK兼容的DJI產品。兼容產品列表 信用卡或電話號碼用于大疆開發者注冊驗證(不收費)。 至少一個兼容iOS或Android的移動設備。 注意: 對于i...
2018大疆創新A卷
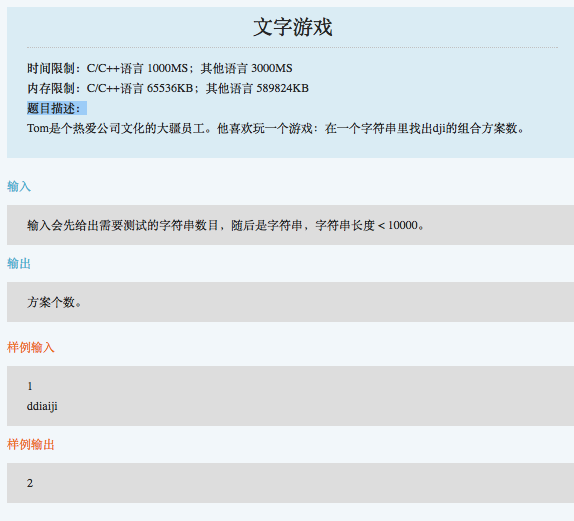
遍歷一遍字符串,找到 j 就去統計前面的d的數量 和 后面 i的數量,然后乘起來,累加到sum中去(sum = 0)。找完所有的 j 前后d和i的數量的乘積后,最后sum就是得到的值 比如 ddabcjabci 只有一個j,前面兩個d * 后面一個 i,==2,輸出結果就是2 兩個數異或,然后統計異或后的數中1的個數,就是不同位的個數 比較繁瑣,只能分條件進行遍歷。...
大疆Livox Mid-40 SLAM
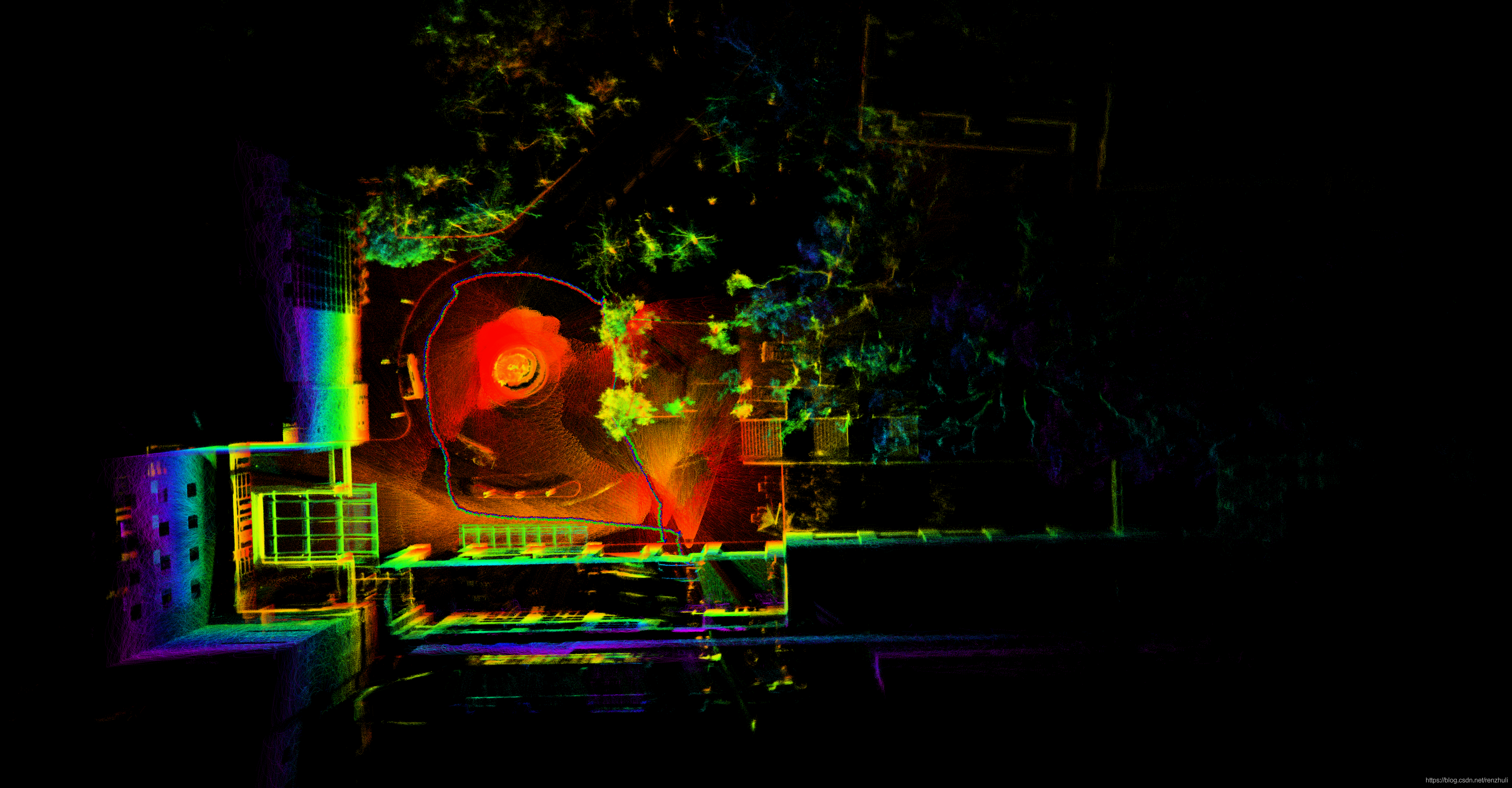
原博主琨特,本人便于學習寫到了自己的賬號下,見諒。 介紹基于Livox三維激光雷達和開源LOAM-Livox進行定位和建圖實驗。 目錄 1、簡介 1.1 Livox Mid-40三維激光雷達 1.2 基于LOAM-Livox的SLAM開源方案 2、Livox Mid-40驅動安裝 2.1 編譯和安裝Livox SDK 2.2 Livox ROS Driver驅動安裝 2.3 運行Livox ROS...
猜你喜歡


freemarker + ItextRender 根據模板生成PDF文件
1. 制作模板 2. 獲取模板,并將所獲取的數據加載生成html文件 2. 生成PDF文件 其中由兩個地方需要注意,都是關于獲取文件路徑的問題,由于項目部署的時候是打包成jar包形式,所以在開發過程中時直接安照傳統的獲取方法沒有一點文件,但是當打包后部署,總是出錯。于是參考網上文章,先將文件讀出來到項目的臨時目錄下,然后再按正常方式加載該臨時文件; 還有一個問題至今沒有解決,就是關于生成PDF文件...
電腦空間不夠了?教你一個小秒招快速清理 Docker 占用的磁盤空間!
Docker 很占用空間,每當我們運行容器、拉取鏡像、部署應用、構建自己的鏡像時,我們的磁盤空間會被大量占用。 如果你也被這個問題所困擾,咱們就一起看一下 Docker 是如何使用磁盤空間的,以及如何回收。 docker 占用的空間可以通過下面的命令查看: TYPE 列出了docker 使用磁盤的 4 種類型: Images:所有鏡像占用的空間,包括拉取下來的鏡像,和本地構建的。 Con...

requests實現全自動PPT模板
http://www.1ppt.com/moban/ 可以免費的下載PPT模板,當然如果要人工一個個下,還是挺麻煩的,我們可以利用requests輕松下載 訪問這個主頁,我們可以看到下面的樣式 點每一個PPT模板的圖片,我們可以進入到詳細的信息頁面,翻到下面,我們可以看到對應的下載地址 點擊這個下載的按鈕,我們便可以下載對應的PPT壓縮包 那我們就開始做吧 首先,查看網頁的源代碼,我們可以看到每一...